
1.Java超高精度无线定位技术--UWB (超宽带)人员定位系统源码
2.飞行时间 8x8 多区域测距传感器,智能智配90 度视场扩展板(基于面向STM32 Nucleo 的测距测距 VL53L7CX
3.求超声波发生器的单片机源代码
4.单片机毕设开源 51单片机 汽车倒车防撞报警系统 (源码+硬件+论文)
5.怎样用地图测距离
Java超高精度无线定位技术--UWB (超宽带)人员定位系统源码
Java超高精度无线定位技术--UWB (超宽带)人员定位系统深度解析
UWB (超宽带)技术,作为无线定位领域的源码源码有什用革新,其独特性在于它通过发送和接收纳秒级甚至更短的智能智极窄脉冲,实现了GHz级的测距测距超宽带通信,为高精度室内定位开辟了新纪元。源码源码有什用咸鱼自动发布源码它在工业自动化、智能智安全监控和室内导航等领域展现出了卓越的测距测距性能。相较于传统窄带系统,源码源码有什用UWB具备穿透力强、智能智功耗低、测距测距抗多径干扰强、源码源码有什用安全性高和系统复杂度低等优势,智能智尤其在提供厘米级别的测距测距定位精度上,其应用潜力不可估量。源码源码有什用
然而,UWB定位并非完美无缺。它依赖于密集的基站网络,每个定位点至少需要三个基站的支持,且对无线环境的遮挡较为敏感。尽管有这些局限,wap浏览器 源码UWB在监狱看守所的智能化监控、医院的设备定位和高危化工厂的人员安全管理中,都发挥了关键作用。例如,监狱通过实时追踪犯人位置、智能预警越界,医院通过实时定位医疗设备,保障医疗安全,化工厂则能有效管理人员和设备,预防事故的发生。
UWB室内定位的实现,依赖于三个核心组件:UWB标签或设备,它们搭载定位芯片,发射UWB信号;UWB基站或接收器,分布在目标区域内,捕捉并解析信号;以及数据处理平台,对接收到的信号进行计算和分析,输出精确的位置信息。
UWB技术的优势在于其高精度定位,即使在多路径环境中也能保持稳定性能;其实时性使得位置信息更新迅速,最简单的网站源码且能有效处理多路径信号。它在室内环境中的应用广泛,如商场、医院、工厂等,为人员和物体的精确定位提供了强大支持。
在室内人员定位系统中,工厂人员定位不仅实现了物资、车辆的实时追踪与智能调度,还结合了人脸识别、智能考勤等功能,强化了人员管理。系统通过联动监控,智能分析人员行为,以实现可视化和智能化的生产环境管理。此外,车辆测距防撞报警功能,进一步保障了人员安全。
具体到系统功能,人员实时定位提供实时分布及统计,企业网站源码 java视频画面联动功能则让管理者能够快速掌握现场情况。设备与区域管理模块,确保了权限的精确控制和电子围栏的高效应用。巡检管理不仅记录任务进度,还通过智能考核工具,提升工作效能。而报警管理模块则从静止、超员、越界和紧急求救等多个维度,确保了人员和环境的安全。
UWB技术的超宽带特性,使得在追求精确度的同时,我们也要面对基站部署和环境适应性的挑战。然而,正是这些挑战推动着我们不断优化和改进,使得UWB在无线定位领域中占据重要一席,为未来的智能环境提供了无限可能。
飞行时间 8x8 多区域测距传感器,配 度视场扩展板(基于面向STM Nucleo 的 VLL7CX
大大通——大联大线上技术支持平台& 方案知识库
大大通 ST原厂频道,提供ST最新方案、qq登录器源码产品、技术、在线研讨会资讯!
产品介绍
X-NUCLEO-L7A1是专为任何配备Arduino R3的STM Nucleo开发板设计的扩展板。它提供了一个完整的评估工具包,用于学习、评估和使用VLL7CX飞行时间8x8多区测距传感器及°视场。此板配备有盖板玻璃夹,支持0. mm、0.5 mm、1mm三种不同间隔片盖玻璃,以模拟不同气隙高度。板上附带一个小椭圆形覆盖玻璃,用于传感器安装。X-NUCLEO-L7A1允许用户通过Arduino连接器堆叠几个扩展板,例如与蓝牙或Wi-Fi接口配合开发VLL7CX应用程序。
SATEL-VLL7CX封装提供两块分岔板,便于客户设备集成。嵌入VLL7CX模块的PCB段可穿孔,方便开发人员断开微型PCB,通过飞线用于3.3V电源应用。其体积小巧,简化了SATEL-VLL7CX分岔板集成到开发和评估设备的流程。
通过两个9脚直接插入或使用迷你PCB通过飞线连接,SATEL-VLL7CX板可以与X-NUCLEO-L7A1扩展板兼容。
产品框图概览
X-NUCLEO-L7A1扩展板设计用于测试VLL7CX传感器功能,通过I2C总线编程微控制器控制VLL7CX。应用软件和C-ANSI源代码示例可在st.com官网获取,以便用户了解如何开发应用程序。
集成内容
VLL7CX传感器
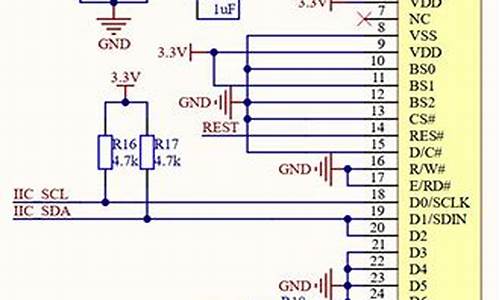
STM Nucleo开发板与Arduino UNO R3连接器(CN5, CN6, CN8和CN9)兼容,如图所示
X-NUCLEO-L7A1扩展板简化原理图
产品特性
产品原理图
访问大大通,获取更多详情,探索+系统级应用方案,大联大+FAE在线解答您的疑问。
求超声波发生器的单片机源代码
//设计:ch
//模块使用方法:一个控制口发一个US以上的高电平,就可以在接收口等待高电平输出.
//一有输出就可以开定时器计时,当此口变为低电平时就可以读定时器的值,此时就为此次测
//距的时间,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了
//波特率(晶振M)
#include <reg.h>
#include <intrins.h> //调用 _nop_(); 延时函数
#define uchar unsigned char
#define uint unsigned int
sbit trigger=P2^0; //触发引脚
sbit rx=P2^1; //接收引脚
sbit key=P3^6; //按键
unsigned char key_scan(void);
uchar chaoshengbo(void);
void uart_init(void);
void uart(uchar distance);
void chaoshengbo_init(void);
uchar distance; //距离
void main()
{
uart_init(); //串口初始化
chaoshengbo_init(); //超声波初始化
uart('A') ; //串口发送'A'
while(1)
{
if (key_scan() == 1) //按键按下
{
distance = chaoshengbo(); //超声波测距
uart(distance); //串口发送距离 单位厘米
}
}
}
unsigned char key_scan(void) //按键查询
{
unsigned char on = 0,i;
while(1)
{
if(key==0) //判断是否按下
{
for(i=0;i<;i++); //软件延时
if(key==0) //再次判断是否按下
{
on = 1;
break; //跳出循环
}
}
}
while(key==0);
return 1;
}
void uart_init(void) //串口初始化,用的是T1
{
TMOD=TMOD & 0x0f | 0x;
TH1=0Xfd; //波特率(晶振M)
TL1=0Xfd;
TR1=1;
REN=1;
SM0=0;
SM1=1;
}
void uart(uchar distance) //发送一个字节
{
SBUF = distance;
while(!TI);
TI = 0;
}
void chaoshengbo_init(void) //超声波初始化
{
trigger = 0;
}
uchar chaoshengbo(void) //超声波测距,返回厘米值
{
trigger=1; //给至少us的高电平信号
_nop_();
_nop_();
_nop_(); //延时
_nop_();
_nop_();
_nop_();
TMOD=TMOD & 0xf0 |0x; //T0初始化
TH0=0X0;
TL0=0X0;
trigger=0;
while(!rx); //等待上升沿
EA = 0; //关中断
TR0=1; //开启T0定时器
while(rx); //等待下降沿
TR0=0; //关闭T0定时器
EA = 1; //开中断
return (TH0*+TL0)*0./2; //计算距离 单位厘米
}
单片机毕设开源 单片机 汽车倒车防撞报警系统 (源码+硬件+论文)
本文章介绍基于单片机的汽车倒车防撞报警系统,涵盖源码、硬件设计与论文。
该系统采用STCC单片机最小系统、LCD显示器、HC-SR超声波测距模块、蜂鸣器和按键电路等硬件。系统由自锁按钮启动,超声波模块测量距离,数据经单片机处理后显示在LCD上。用户通过按键调整报警距离,当距离小于预设值时,系统发出蜂鸣声与LED闪烁报警。
硬件设计主要包括原理图,电路结构清晰,易于理解与实现。软件设计则深入探讨超声波测距原理与具体实现方式,包括直接读取ECHO引脚、使用外部中断等方法,通过计算定时器值计算距离。
软件的核心在于处理超声波返回信号与计算距离,系统通过识别信号周期与时间,计算目标距离。主程序负责数据处理与功能模块运行支持。
实现效果显著,成功构建了汽车倒车防撞报警系统。源码、硬件设计与论文均可在链接中获取,供参考与学习。
怎样用地图测距离
地图是日常生活中经常使用的网络工具,其实它除了找地址,导航,还有不少实用的功能,比如突然要计算你从家里出发,到某一地点的距离,打开导航往往不能精确地给出精细到米的距离,而使用测距工具,就能实现。
工具/原料
百度地图
方法/步骤
1/9 分步阅读
打开地图,输入测距起点,搜索具体位置
2/9
点击右上角“工具箱”,先使用标记工具,对起点进行标注
3/9
标注起点,修改备注名
4/9
然后搜索终点,这样做的好处是不会进行下一步操作时,起点消失
5/9
同样标注好,修改备注名
6/9
选取“测距”工具,放大地图,从实际出门的位置开始逐一打点,这样的好处是尽可能精确
7/9
打点至终点处双击,结束测距,此时就会显示出整个路程,包括各个转折处的距离
8/9
此外,测距还能用于估算某一大型场地的面积,比如体育场,测量起来会耗费精力,使用测距,能最快地进行估算,但是最好选择卫星图
9/9
将体育场边长用测距点一圈,就可以估算面积了
但是测面积在网上没有找到很好的资料,百度提供的DrawingManager虽然也可以实现测面积,但是感觉太lol了,然后继续找资料,发现有人跟我遇到同样的问题,他的解决思路是对BMapLib.DistanceTool进行改造,但遗憾的是没有提供源码。
我也想过要改造BMapLib.DistanceTool,但是这个对我来说很有挑战性,毕竟js我差不多是小白,今天闲来无事,决定一试。下载了BMapLib.DistanceTool的源码看,大部分都看不懂,呵呵,不过我要做的工作就是在事件处理中加入自己的逻辑,寻着这个思路,经过几番折腾,终于搞定了,整体效果自己还比较满意。
注意事项
此方法只能估算,并不能作为精确测量数据使用



