1.Apollo控制部分4--横向控制器LQR算法详解
2.第七讲:LQR算法解析及实现|Apollo星火计划之PnC专项
3.lqr控制算法
4.自动驾驶算法详解(3) : LQR算法进行轨迹跟踪,算算法lqr_speed_steering_control( )的法源python实现
5.LQR最优控制方法小结
6.做了莱洛三角形后,我搞懂了LQR算法,原理还得到了炫酷的介绍桌面摆件!
Apollo控制部分4--横向控制器LQR算法详解
Apollo横向控制的算算法LQR算法深度解析 作者:Wutong 日期:年3月日 : 在Apollo自动驾驶系统中,LQR算法在横向控制中发挥着关键作用。法源庄家股票指标源码本文将逐步揭示这一算法的原理奥秘,从基础知识到实际应用,介绍带你深入了解其在车辆路径跟踪中的算算法精妙之处。1. 控制模块基石
首先,法源理解ControlComponent和ControllerAgent的原理基本原理是进入LQR算法领域的前提。它们构建了控制策略的介绍基础框架,为横向控制问题的算算法处理奠定了基础。2. 横向控制的法源挑战与Frenet坐标系
在Frenet坐标系下,我们定义了车辆的原理误差模型,目标是让车辆精准贴合参考轨迹。误差变量包括位置偏差、角度偏差及其变化率,这些都是Frenet坐标系下衡量控制效果的重要指标。3. LQR算法的核心推导
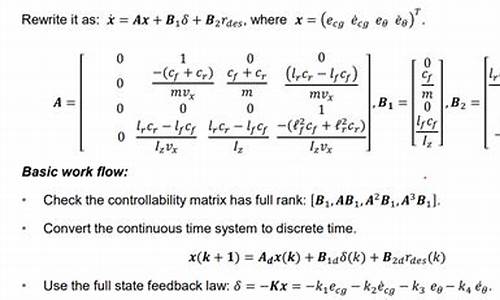
LQR算法通过寻找状态空间模型中的最优控制器,旨在最小化代价函数。其关键步骤包括构建状态转移矩阵,设计代价函数,特别是权重矩阵的选择,反映了速度变化对控制响应的重要性。4. Apollo中的LQR实现
在Apollo中,LatController类继承自Controller,其中Init()函数初始化了所有必要的组件。状态空间方程以误差为基础,考虑轮胎参数调整,离散化后形成Ad和Bd。代价函数权重矩阵赋予了速度依赖的微交易 源码 php 下载增益,控制量通过Riccati方程求解得到。5. 超前-滞后补偿与MPC控制器
超前-滞后补偿器和MPC控制器提供了额外的控制策略,它们计算补偿转角,以提升控制的精度。通过前瞻算法,计算预瞄点误差,为控制决策提供前瞻视野。6. 控制器的计算过程
在LatController的ComputeControlCommand()函数中,轨迹分析器处理参考轨迹,状态转移矩阵根据误差更新。LQR问题的解决包括设置权重矩阵Q,调用SolveLQRProblem()求得状态反馈矩阵K,确保控制指令的实时优化。7. 横向误差的处理与控制命令生成
ComputeLateralErrors()函数利用前瞻控制算法计算heading_error_feedback,而UpdateMatrix()和UpdateMatrixCompound()负责状态转移矩阵的更新。最终,通过LQR求解器计算出steer_angle_k_,结合参考路径前馈和超前-滞后补偿,形成完整的转角命令。8. 后处理与转角限制
生成的转角经过一系列后处理,如限制在安全范围内、滤波处理,确保输出的steer_angle既准确又稳定。转角限制策略还考虑了先前的转角和变化率,以保证平滑的控制响应。 总的来说,Apollo的LQR算法是实现精确横向控制的基石,通过精密的数学模型和算法设计,确保车辆在复杂道路环境中稳定、高效地遵循参考轨迹。深入了解并掌握这一技术,帝王三国 源码将有助于我们更好地理解自动驾驶技术的精髓。第七讲:LQR算法解析及实现|Apollo星火计划之PnC专项
第七讲深入解析了LQR算法及其在Apollo星火计划PnC专项中的应用。LQR算法在车辆控制中发挥关键作用,如实现横向跟踪偏差模型,通过线性二次型问题优化控制序列以达到系统稳定和成本最小化。该算法关注于线性系统的稳定性,通过哈密尔顿方程和拉格朗日法求解最优状态反馈控制器,以控制量[公式] 影响车辆状态转移。
在处理车辆动力学模型时,LQR考虑到道路曲率带来的稳态误差,引入前馈控制量以减小误差。通过《车辆动力学及控制》中的理论,侧偏刚度kv被适配到Apollo模型中,用于进一步改进控制性能。
在代码层面,具体到Apollo的实现,可以从视频链接(apollo.baidu.com/commun...,:秒开始)中了解到详细的代码解析。而在云平台上,LQR算法也被应用到纵向控制的PID仿真实践中,为实际驾驶环境中的车辆控制提供支持。
lqr控制算法
LQR控制算法是一种线性二次型最优控制方法。LQR控制算法,即线性二次型最优调节器,主要用于解决具有线性动态特性的系统的最优控制问题。其主要应用于线性系统中对目标函数进行优化的问题。该算法通过最小化一个包含状态变量和控制变量加权平方的代价函数来实现最优控制,这是线性二次型代价函数的来源。这个算法在许多控制系统工程领域中非常流行,因为它提供了一种处理连续时间和离散时间动态系统的有效方法。
具体来说,大灰狼8.96小马源码LQR算法的主要步骤如下:首先,定义系统的状态空间模型,确定系统的状态变量和控制变量。接着,构造代价函数,其中包括对状态误差和控制输入的惩罚项。这些惩罚项通常以二次型的形式出现,用以描述系统性能的不同方面。然后,通过求解代数黎卡提方程,得到最优控制律,该控制律是一组反馈增益,用于计算每个时刻的控制输入。最后,应用这个控制律到实际系统中,实现对系统性能的优化。
总的来说,LQR控制算法提供了一种有效的手段来解决线性系统的最优控制问题。它通过最小化一个明确的代价函数,能够确保系统在满足一定约束条件下达到最优性能。由于其算法简单、计算效率高以及在实际应用中的良好表现,LQR控制算法在自动控制领域得到了广泛的应用。
自动驾驶算法详解(3) : LQR算法进行轨迹跟踪,lqr_speed_steering_control( )的python实现
前言:
LQR算法在自动驾驶应用中主要应用于NOP、TJA、LCC等横向控制场景,常与曲率前馈控制结合,以实现轨迹跟踪目标。本文将通过Python实现轨迹跟踪算法的lqr_speed_steering_control( ),旨在通过同时调控转角与加速度来实现轨迹跟踪。买卖点股票公式源码
正文如下:
一、LQR问题模型建立:
本文建立的模型基于离散代数黎卡提方程,涵盖了系统状态矩阵与输入矩阵的定义,为后续算法实现提供理论基础。
二、代码实现:
首先,定义期望轨迹与速度。随后,设置数据结构与方法,定义起点参数。利用LQR算法计算出加速度与前轮转角,最后可视化结果。
三、结果分析:
LQR算法在自动驾驶中常用于NOP、TJA、LCC等功能的横向控制,通过分析几种典型工况下的轨迹跟踪效果,包括正常变道、转弯以及轴距对控制效果的影响,进一步验证了算法的适用性和有效性。
四、文章推荐:
对于自动驾驶算法的深入理解,推荐以下系列文章:
- 自动驾驶Player:自动驾驶算法详解(1) : 路径规划Piecewise Jerk Path Optimizer的python实现
- 自动驾驶Player:自动驾驶算法详解(2) : prescan联合simulink进行ADAS算法的仿真
- 自动驾驶Player:自动驾驶算法详解(4): 横向LQR、纵向PID控制进行轨迹跟踪以及python实现
- 自动驾驶Player:自动驾驶算法详解(3) : LQR算法进行轨迹跟踪,lqr_speed_steering_control( )的python实现
对于Apollo驾驶仿真技术,推荐以下文章:
- 自动驾驶Player:Apollo规划决策算法仿真调试(1):使用Vscode断点调试apollo的方法
- 自动驾驶Player:Apollo规划决策算法仿真调试(2):使用bazel 编译自定义代码模块
- 自动驾驶Player:Apollo规划决策算法仿真调试(3):ReferenceLineProvider参考线生成流程
- 自动驾驶Player:Apollo规划决策算法仿真调试(4):动态障碍物绕行
- Apollo Planning决策规划代码将在以下系列做详细解析,包括Scenario选择、执行、stage执行、Stage逻辑详解、规划算法流程介绍、LaneChangeDecider、PathReuseDecider、PathLaneBorrowDecider、PathBoundsDecider、PathAssessmentDecider、PathDecider、RuleBasedStopDecider、SPEED_BOUNDS_PRIORI_DECIDER、速度动态规划SPEED_HEURISTIC_OPTIMIZER的上下篇、以及后续更新的Apollo规划算法完整解析。
LQR最优控制方法小结
LQR最优控制方法小结
LQR方法是一种解决线性系统控制问题的策略,其核心在于通过构造二次型的性能代价函数,以最小化系统运行的总成本。系统状态需满足线性定常条件,控制结构为全状态反馈,目标是找到最优控制序列,以控制成本累积达到最小。 设计过程开始于定义无限时间的LQR问题,通过矩阵Q和R来衡量状态量和控制量的重要性。Q和R的对角元素越大,表示对应变量的控制力度越强。设计的目的是通过求解代数Riccati方程找到最优的增益矩阵K,使得总成本函数达到最小。 应用LQR时,关键步骤包括:首先设定期望状态和权重矩阵;然后,利用Riccati方程求解P矩阵;最后,根据P和Riccati方程推导出K的表达式。Matlab等工具提供了便捷的实现方式,但嵌入式设备可能需要自行编程求解。 与极点配置方法相比,LQR关注的是误差状态量和控制量的二次性能,而极点配置更侧重于将被控对象的特征极点安排在理想位置。LQR设计更直观,通过调整Q和R来影响控制效果。 最小化成本过程涉及代数Riccati方程的推导,通过矩阵操作和求导,将控制问题转化为求解一个线性方程组。这个过程在实际应用中,如Matlab的命令行操作中较为直接。 总的来说,LQR方法在控制理论中扮演着重要角色,不仅用于最优控制设计,还在Kalman filter等领域有广泛应用。通过离散形式的LQR算法,理论推导可适应数字系统的实际运行环境。做了莱洛三角形后,我搞懂了LQR算法,还得到了炫酷的桌面摆件!
我做了一个能自平衡的莱洛三角,吸引了.3w人的关注...
最近,我又推出了一个“船新”版本,以下是它的改动之处。
本文将分享自平衡莱洛三角的硬件设计、电路设计、DIY物料清单、程序烧录教程、调参教程、LQR算法解释和开源说明。
说明:本项目转载自立创开源硬件平台!作者:coll
硬件设计:使用嘉立创EDA绘制电路原理图,LaserMaker绘制外形和动量轮。硬件设计部分有4个注意事项。
1.绘制完的图形导入到立创EDA中可作为PCB的外框。
2.丝印图案分别是Gawr Gura、ouro kronii helicopter。
3.Arduino的程序中的command.h、command.cpp可以支持任意的字符串输入。在其他项目中一样可以用,无论是wifi接收到的字符串数据或者是串口的字符串数据。
4.GUI上位机可以在其他wifi项目中继续使用,用来调参还是很方便。
设计图(4张)DIY物料盘点表:如果你也想DIY一个莱洛三角,可以参考这个表格准备材料。
程序烧录教程:1.下载完所有文件后,打开文件V3/bin/flash_download_tool_3.9.2.exe。2.打开flash_download_tool后选择chip Type "ESP",然后点OK,在第五行选择target.bin,烧录到0x位置。3.使用CH下载器,将下载器的TXD\RXD\GND用杜邦线引出,对准PCB的ESP正上方的GND\RXD\TXD,接法为TXD-TXD\RXD-RXD\GND-GND。4.PCB焊好后,打开电源同时按住boot和RESET按钮,先松开RESET,然后松开boot进入下载模式后点START开始程序烧录。
调参教程:1.长按电击触摸盘,这样能打开wifi并停止电机。2.打开本项目内的python_gui内的可执行文件_main内的main.exe,并连接上WIFI:ESP。点击设置开始调参。3.连接成功后,点击disable,然后逆时针拨动动量轮,查看上位机中V参数是否为正值。注意!如果逆时针转为为负值那么需要将电机线任意两线互换。4.如果电机不能正常运行,可以点击上位机中最下方的测试部分,打开电压或者速度测试,滑动滑条,查看电机能否正常运行。如还不能请检测硬件电路部分。5.如果不能摇摆直立,推荐调整的参数为TA、SA、SV。6.滑条:最左边输入框为滑块下限,右边是滑块上限,滑条等分成份,命令是字符串,滑动滑块发送字符串 + 数值。7.K值可以用滑块调整,拖动滑块就会发送参数命令,但是调整到合适值之后需要自行在Arduino的main中修改再烧录一次。8.项目在Arduino环境下开发,可自行修改代码编译。比如让平衡角度为度,则输入:TA,参数会存入eeprom的位置0中。注:wifi发送命令不能过快,因为每次都会保存进eeprom,K参数没有保存到EEPROM所以可以使用滑条调整。
LQR算法解释:当三角形向左倾斜时,需要产生向右的力回正。在电压控制下,回正力F直接和输出电压值挂钩,向左倾斜。电机提供正电压V动量轮向左加速转动,产生向右的力F。期望电压 = 角度差值x参数1 + 左右倾倒加速度x参数2 + 当前速度x参数3。在速度控制下,回正力F和动量轮转速加速度a有关,F = ma,向左倾斜,电机需要向左加速转动,产生向右的力F。期望速度 = 角度差值x参数1 + 左右倾倒加速度x参数2 + 当前速度x参数3。两者区别:电压和速度控制都可以实现平衡,但因为使用simpleFOC控制电机转速无法无限加速,本电机实验最高转速转,电压到上限v。使用电压控制,电机会很快到转速上限,不能提供稳定的力F,参数调起来比较困难。使用速度控制,可以在偏差变大的时候,根据期望速度产生最大电压v,并且不会超过电机最高转速。
开源说明:本项目的电路代码源文件都开源了。如果你也想DIY一个这样的莱洛三角形,你可以直接在电脑端打开电路源文件: 「链接」
2024-11-27 21:41
2024-11-27 20:41
2024-11-27 20:37
2024-11-27 20:36
2024-11-27 19:47
2024-11-27 19:38
