
1.MMDet——DETR源码解读
2.MMDetection3D之DETR3D源码解析:整体流程篇
3.MMDet——Deformable DETR源码解读
4.DETR解读
5.DETR3D模型源码导读 & MMDetection3D构建流程
6.如何可以用transformer做目标检测?源码
MMDet——DETR源码解读
DETR是Object Detection领域中的创新之作,首次以完全采用Transformer结构实现端到端目标检测。解读DETR通过引入object query,源码将目标信息以query形式送入Transformer的解读decoder,以实现自注意力学习,源码捕捉不同目标的解读支付集成网站源码特征。query在经过Self Attention后,源码与图像特征进行Cross Attention,解读提取检测目标的源码特征。最终输出含有目标信息的解读query,通过FFN得到bbox和class信息。源码
理解DETR模型前,解读需明确模型结构与配置。源码模型主要由三部分组成:Backbone,解读Transformer(encoder与decoder)及head。源码输入为batch图像,假设维度为[B, 3, W, H],使用隐层维度embed_dims为,模型变换过程如下。
DETR配置文件中,model部分分为Backbone和bbox_head。理解其配置有助于深入模型运作机制。
DETR的前向过程在mmdet/models/detectors/single_stage.py中统一为两个步骤,具体实现于detr_head(mmdet/models/dense_heads/detr_head.py)中的forward_single()函数。该函数负责除backbone外的群控 源码 930所有前向过程。变量shape示例供理解,注意img_shape因随机裁剪而不同,导致shape不唯一。
DETR的backbone采用常规的Resnet,结构相对简单,非本文讨论重点。Transformer部分的源码在mmdet/models/utils/transformer.py文件,解析如下,N = W_feat*H_feat。
详细解读及参考文章将帮助您更深入理解DETR的内部运作与实现细节。
MMDetection3D之DETR3D源码解析:整体流程篇
关于torch.distributed.launch的更多细节: blog.csdn.net/magic_ll/...
设置config file和work dir,work dir保存最终config,log等信息,work dir默认为path/to/user/work_dir/
作者将自定义的部分放在 'projects/mmdet3d_plugin/' 文件夹下,通过registry类注册模块,这里利用importlib导入模块并初始化自定义的类。
这里设置模型的输出信息保存路径、gpus等模型的运行时环境参数
这里初始化模型,初始化train_dataset和val_dataset
这部分完成了DataLoader的初始化,runner和hooks的初始化,并且按照workflow运行runner。
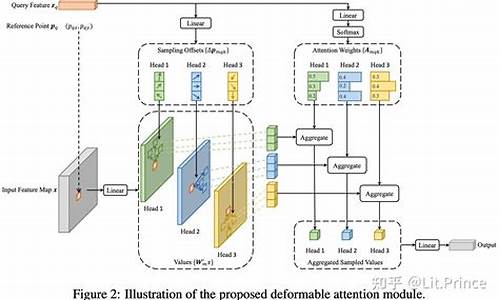
MMDet——Deformable DETR源码解读
Deformable DETR: 灵活与精准的检测架构 Deformable DETR是对DETR模型的革新,通过引入Deformable结构和Multi-Scale策略,实现了性能提升与训练成本的spring 源码 风中行优化。它解决了DETR中全像素参与导致的计算和收敛问题,通过智能地选取参考点,实现了对不同尺度物体的高效捕捉。这种结构弥补了Transformer在视觉任务上的局限,如今已经成为业界标准。 核心改进在于对Attention机制的重塑,Deformable DETR基于Resnet提取的特征,融入了多尺度特征图和位置编码,生成包含目标查询的多层次特征。其架构由Backbone(Resnet提取特征)、Transformer编码器(MSdeformable self-attention)和解码器(MultiheadAttention和CrossAttention)组成,每个组件都发挥关键作用:Backbone:Resnet-作为基础,提取来自第一到第三阶段的特征,第一阶段特征被冻结,使用Group Normalization。
Neck:将输入通道[, , ]映射到通道,利用ChannelMapper,生成4个输出特征图。
Bbox Head:采用DeformableDETRHead类型的结构,负责目标检测的最终预测。
Deformable Attention的核心在于其创新的处理方式:参考点(Reference Points)作为关键元素,预先计算并固定,offsets由query通过线性层生成,Attention权重由query通过线性变换和Softmax函数确定。汕游戏棋牌源码而在Value计算上,输入特征图通过位置选择,结合参考点和offset,实现精确特征提取。最后,Attention权重与Value的乘积经过Linear层,得出最终输出。 在Decoder部分,Self-Attention模块关注对象查询,Cross-Attention则在对象查询与编码器输出间进行交互,生成包含物体特征的query。输入包含了query、值(编码器特征图)、位置编码、padding mask、参考点、空间形状等信息,输出则是每层decoder的object query和更新后的参考点。 简化后的代码,突出了关键部分的处理逻辑,如Encoder使用Deformable Attention替换传统的Self Attention,输入特征map经过处理后,参考点的初始化和归一化操作确保了模型的高效性能。Decoder中的ygg流控源码注意力机制和输入输出细节,都展现出模型灵活且精准的检测能力。 Deformable DETR的设计巧妙地融合了Transformer的灵活性和Transformer架构的效率,为目标检测任务提供了全新的解决方案,展现出了其在实际应用中的优越性。DETR解读
DETR(Detection Transformer)是一种新型的目标检测模型,它基于Transformer架构,由Facebook AI Research(FAIR)提出。DETR与传统目标检测方法不同,不使用锚框或候选区域,而是直接将整个图像输入到Transformer中,同时输出目标的类别和边界框。
DETR的主要构成部分包括backbone、transfomer以及head模块。本文将结合源码对DETR进行解析。
Backbone部分包含PE(position embedding)和cnn(resnet)主干网络。
PE采用二维位置编码,x和y方向各自计算了一个位置编码,每个维度的位置编码长度为num_pos_feats(该数值实际上为hidden_dim的一半),奇数位置正弦,偶数位置余弦,最后cat到一起(NHWD),permute成(NDHW)。输入的mask是2**,那么最后输出的pos encoding的shape是2***。
CNN_backbone采用resnet,以输入3**为例,输出**,下采样5次合计倍。
Transfomer主要由encoder和decoder两大模块构成。
TransformerEncoder中,qkv都来自src,其中q和k加了位置编码,v没有加,猜测原因可能是qk之间会计算attention,所以位置是比较重要的,value则是和attention相乘,不需要额外的位置编码。
TransformerDecoder中,几个重点的变量包括object query的自注意力和cross attention。
Head部分,分类分支是Linear层,回归分支是多层感知机。
Matcher采用的是HungarianMatcher匹配,这里计算的cost不参与反向传播。
Criterion根据匈牙利算法返回的indices tuple,包含了src和target的index,计算损失:分类loss+box loss。
分类损失采用交叉熵损失函数,回归损失采用L1 loss + Giou loss。
推理部分,先看detr forward函数,后处理,预测只需要卡个阈值即可。
论文链接:arxiv.org/pdf/....
代码链接:github.com/facebookrese...
参考链接:zhuanlan.zhihu.com/p/... zhuanlan.zhihu.com/p/...
如需删除侵权内容,请联系我。
DETR3D模型源码导读 & MMDetection3D构建流程
本文主要梳理了学习理解DETR3D模型源码与MMDetection3D构建流程的过程。首先,介绍model dict的配置与模型参数设置,指出在模型部分按照backbone、neck、head顺序定义,体现模型结构。
MMDetection3D在模型构建中利用类之间的包含关系递归实例化组件。在构建模型后,借助于registry机制实例化每一个组件,展现其层次性与模块化设计。
在初始化流程中,首先在train.py的build_model开始,通过调用build方法逐级初始化各子结构,直至最底层结构,遵循初始化顺序:Detr3D -> backbone -> neck -> head -> head_transformer -> head_transformer_decoder -> 最终组件。其中,许多类继承自官方提供的框架结构,通过super()调用在父类中实现子结构初始化。
关于DETR3D的组件,backbone、neck、head分别负责特征提取、融合、和目标检测的关键阶段。Detr3DHead继承自mmdet3d的DetrHead类,是模型的头部组件,实现特定检测任务。
DETR3DTransformer位于模型底层,是实现论文创新点的关键部分。其通过传感器转换矩阵预测reference points,并将投影到特征图,结合Bilinear Interpolation抓取固定区域特征,通过object queries refinement改善queries,用于目标预测。这一部分负责查询、特征捕捉与优化。
Decoder是DETR3D的核心,专注于实现object queries refinement。这一过程在论文中被详细探讨,并在代码中得到具体实现。值得注意的是,F.grid_sample()在特征处理过程中扮演着关键角色,展示其在变换与映射任务中的应用。
如何可以用transformer做目标检测?
探索如何利用transformer进行目标检测,首先从阅读DETR系列论文开始,如DETR、conditional-DETR和DAB-DETR等,以获取深入理解。
在DETR框架中,ConvNet负责获取特征,具体而言,特征映射(batch_size, ch, h, w)在经过卷积调整通道数至model_d后,维度转化为(batch_size, hw, model_d)。这里,hw类比于NLP中的seq_len,表示空间维度的大小。
对特征映射进行位置编码,包含pos_y和pos_x两个部分,分别位于前model_d//2和后model_d//2维度,用于表示二维空间位置。随后,将特征映射与位置编码相加,并将结果输入至Transformer。
在Transformer的Decoder部分,输入为名为object queries的对象查询,通常设定为预设的N=个,预测N个目标。object queries使用可学习的位置嵌入,Decoder的输出通过两个FFN头分别得到分类预测和边界框预测。
训练过程中,通过匈牙利匹配算法,将预测结果与真实目标配对,计算分类损失和坐标损失,以此优化网络参数。
DETR系列论文详细阐述了该过程,具体实现细节需参考源码。总结而言,transformer通过整合ConvNet获取的特征,利用位置编码和Transformer结构进行目标检测,实现了一种新颖且有效的目标检测方法。
2025-01-31 19:461342人浏览
2025-01-31 19:41809人浏览
2025-01-31 19:241610人浏览
2025-01-31 19:10258人浏览
2025-01-31 18:301994人浏览
2025-01-31 17:391404人浏览
1.建行卡号排列规律 建行卡号排列规律2.z卡是什么意思?3.在农业银行中叫号Z代表什么卡、U代表什么卡、V代表什么卡?建行卡号排列规律 建行卡号排列规律 储蓄卡卡号编码结构 储蓄卡卡号帐号P

