
1.【干货|开源MIT Min cheetah机械狗设计(二十三)】运动控制器源码解析---控制和优化思想
2.djangoä¸mvcåå«ä»£è¡¨ä»ä¹ç¨(djangomvc)
3.干货|开源MIT Min cheetah机械狗设计(二十一)运动控制器源码解析---刚体动力学建模
4.Gitea源码分析(一)
5.plc开源是源码什么意思?
6.Arduino是啥

【干货|开源MIT Min cheetah机械狗设计(二十三)】运动控制器源码解析---控制和优化思想
开源MIT Min Cheetah机械狗设计:控制与优化解析
在这个开源项目中,MIT Min Cheetah机械狗的控制控制与优化策略是其亮点,特别是源码MPC控制与QP优化策略。WBC作为辅助手段,控制已在前期讨论,源码本文主要聚焦于这两个核心部分。控制情侣软件源码 控制问题的源码核心是通过状态方程,如微分方程,控制来描述和控制系统的源码运动,如牛顿第二定律。控制它不仅体现了物理规律,源码如位移与速度的控制关系,而且揭示了如何通过不同的源码输入策略达到期望状态,这便是控制优化的起点。 优化则涉及代价函数的源码选择和权重设置。LQR关注整个时间的最优性,而MPC关注当前时刻到未来的源码上传解压最优路径。LQR是闭环控制,而MPC是开环的,这使得MPC可以处理不等式约束,适应更复杂的控制环境。 相较于传统PID控制,现代控制理论如状态空间模型,具有更强的系统理解能力,但复杂项目中,传统控制方法仍占有重要地位。例如在汽车行业,虽然现代控制算法有优势,但安全性和落地性仍是考量的关键。 控制算法的应用领域主要集中在无人机、机器人和汽车工业,尤其是动力学模型成熟的场景。机器学习和强化学习作为补充,ipp 6.0源码分别在参数辨识和规则环境中的应用有所贡献,但仍有发展空间。 接下来,我们将深入探讨机械狗的仿真实现,以及可能的扩展功能,如路径规划和激光雷达扫描,以期为设计提供更全面的支持。djangoä¸mvcåå«ä»£è¡¨ä»ä¹ç¨(djangomvc)
导读ï¼å¾å¤æåé®å°å ³äºdjangoä¸mvcåå«ä»£è¡¨ä»ä¹ç¨çç¸å ³é®é¢ï¼æ¬æé¦å¸CTOç¬è®°å°±æ¥ä¸ºå¤§å®¶å个详ç»è§£çï¼ä¾å¤§å®¶åèï¼å¸æ对大家ææ帮å©ï¼ä¸èµ·æ¥ççå§ï¼mvcä¸çmvcåå«æä»ä¹MVCæ¯Javaä¸çä¸ç§è®¾è®¡æ¨¡å¼ï¼å¨ä½ åç¨åºçæ¶åä¸å®å¾æç §è¿æ ·ç模å¼å代ç ï¼ä»çç®çæ¯ä¸ºäºåå°å±ä¸å±ä¹é´çè¦åï¼æ¹ä¾¿åç»çç»´æ¤
Mââæçæ¯Modelï¼å³æ¨¡åï¼å¨å®é çå¼åä¸æ们çå®ä½ç±»å°±æ¯æ们ç模åï¼åéä¿ä¸ç¹å°±æ¯ä½ åäºå¾å¤private修饰çåéï¼ç¶ååäºå¾å¤getãsetæ¹æ³ç类就å«æ¨¡å
Vââæçæ¯Viewï¼å³è§å¾ï¼å°±æ¯æ们JavaWEBä¸çè§å¾ï¼ä¹å°±æ¯JSPäºï¼éä¿ä¸ç¹å°±æ¯ç¨æ·å¯ä»¥çå°ç页é¢å°±å«åè§å¾
Cââæçæ¯Controllerï¼å³æ§å¶å¨ï¼å°±æ¯æ们å¨æ¥æ¶å端穿è¿æ¥ç请æ±çé£ä¸ªç±»å°±å«åæ§å¶å¨ï¼æ¯å¦æ们çservletï¼å模ååéæ°æ®ï¼æ§å¶ç¨æ·è¾å ¥ï¼è¯»åè§å¾çæ°æ®
mvcæ¯ä»ä¹,æä»ä¹ç¨mvcï¼modelâviewâcontrollerï¼æ¯è½¯ä»¶å·¥ç¨ä¸çä¸ç§è½¯ä»¶æ¶æ模å¼ï¼æ软件系ç»å为ä¸ä¸ªåºæ¬é¨åï¼
模åï¼modelï¼ï¼è§å¾ï¼viewï¼åæ§å¶å¨ï¼controllerï¼ã
mæ
模åãå³ç¨åºåç¼åç¨åºåºæçåè½ï¼å®ç°ç®æ³ççï¼ï¼æ°æ®åºä¸å®¶è¿è¡æ°æ®ç®¡çåæ°æ®åºè®¾è®¡(å¯ä»¥å®ç°å ·ä½çåè½)ã
模åï¼modelï¼
ç¨äºå°è£ ä¸åºç¨ç¨åºçä¸å¡é»è¾ç¸å ³çæ°æ®ä»¥å对æ°æ®çå¤çæ¹æ³ãâ
model
âæ对æ°æ®ç´æ¥è®¿é®çæåï¼ä¾å¦å¯¹æ°æ®åºç访é®ãâmodelâä¸ä¾èµâviewâåâcontrollerâï¼ä¹å°±æ¯è¯´ï¼
model
ä¸å ³å¿å®ä¼è¢«å¦ä½æ¾ç¤ºææ¯å¦ä½è¢«æä½ãä½æ¯
model
ä¸æ°æ®çååä¸è¬ä¼éè¿ä¸ç§å·æ°æºå¶è¢«å ¬å¸ã为äºå®ç°è¿ç§æºå¶ï¼é£äºç¨äºçè§æ¤
model
ç
view
å¿ é¡»äºå å¨æ¤
model
ä¸æ³¨åï¼ä»èï¼view
å¯ä»¥äºè§£å¨æ°æ®
model
ä¸åççæ¹åã
微软msvc++è§çªç¨åº
ç
mfc
document/viewæ¶æ
æ¯æ©æ对äºmvc模å¼çå®ç°ï¼mfcå°ç¨å¼åæcview以åcdocument两大类å«ï¼å ¶ä¸çdocument对åºmvcä¸ç
model
ï¼view
ç¸å½äºmvcä¸ç
viewï¼controllerï¼åå ä¸cwinappç±»å«ï¼åæä¸å¤§é¡¹ãä½æ¯åºæ¬ä¸mfcæ¯ä¸ä¸ªå¤±è´¥çmvc模å¼ä½åã
python+djangoMTVæ¡æ¶åphpMVCæ¡æ¶çä¸åä¹å¤
python+djangoMTVæ¡æ¶åphpMVCæ¡æ¶çä¸åä¹å¤
æè¿å¦ä¹ äºpythonè¯è¨ådjangoMTVæ¡æ¶ï¼æè§ç¨çå¾ç½åãè¿éç»å¤§å®¶ç²ç¥çä»ç»ä¸ä¸ã
Djangoæ¯ä¸ä¸ªå¼æ¾æºä»£ç çWebåºç¨æ¡æ¶ï¼ç±Pythonåæãéç¨äºMTVç设计模å¼ï¼å³æ¨¡åMï¼æ¨¡çTåè§å¾æ§å¶å¨Vãå®æåæ¯è¢«å¼åæ¥ç¨äºç®¡çå³ä¼¦æ¯åºçéå¢æä¸çä¸äºä»¥æ°é»å 容为主çç½ç«çã并äºå¹´7æå¨BSD许å¯è¯ä¸åå¸ãè¿å¥æ¡æ¶æ¯ä»¥æ¯å©æ¶çåæ®èµçµå£«åä»æDjangoReinhardtæ¥å½åçã
Djangoç主è¦ç®æ æ¯ä½¿å¾å¼åå¤æçãæ°æ®åºé©±å¨çç½ç«åå¾ç®åãDjango注éç»ä»¶çéç¨æ§åâå¯æææ§âï¼ææ·å¼ååDRYæ³åï¼Don'tRepeatYourselfï¼ãå¨Djangoä¸Python被æ®é使ç¨ï¼çè³å æ¬é ç½®æ件åæ°æ®æ¨¡åã
å ³é®ä¸ç¹æ¯Djangoæ¡æ¶ææ§å¶å±(Ctronllayer)ç»å°è£ äºï¼æ éä¸æ°æ®äº¤äºè¿å±é½æ¯æ°æ®åºè¡¨ç读,å,å é¤,æ´æ°çæä½.å¨åç¨åºçæ¶åï¼åªè¦è°ç¨æ¹æ³å°±è¡äº.æè§å¾æ¹ä¾¿.ç¨æ·å¯ä»¥ç¨å¾å°ç代ç å®æå¾å¤çäºæ .代ç å¯è¯»æ§å¼º.è¿è¡çé度æ¯phpè¦å¿«.
pythonæ¯åµå ¥å¼çè¯è¨,å®å¯ä»¥æCåJAVAè¯è¨çåçä¸è¥¿ç»åå¨ä¸èµ·.ä¹é¾æªGoogleå ¬å¸ä¸»å¯¼è®®è¯è¨ç¨python,c++,javaçæ¯è¾å¤.大çå ¬å¸æ¯è¾éè§ç³»ç»ç®¡çåæ»ä½çæ¶æ.
æ人说ææåå±çè¯è¨æ¯python,ä¸è¿é½å¼å¾å¤§å®¶å»æ¢è®¨ç.å 为ç»æé½å¾é¢æ,å段æ¶é´é¹çå¾ççæ¯Rubyè¯è¨,Rubyååºæ¥æ¶,ä¼ è¯´ä¹å¾äºå¾,ç°å¨çèµ·æ¥ä¹ä¸æä¹è¡äº.
Pythonçåæ¯
Pythonå¨ç¼ç¨é¢åçå æçä¸ç´å¤äºç¨³æ¥ä¸åä¹ä¸ï¼æ ¹æ®ææ°çæ°æ®ï¼Pythonæå第ä¸ãåå ååå«æ¯Java,C,VB,C++,PHPåPerl.ä½ä¸ºä¸ä¸ªå¾å¹´è½»çè¯è¨ï¼Pythonçä½ç½®å·²ç»ç¸å½ä»¤äººæ¯å¥äºãéç微软å°Pythonçº³å ¥.Netå¹³å°ï¼ç¸ä¿¡Pythonçå°æ¥ä¼æ´å 强å²åå±ãPythonå¾å¯è½ä¼æ为.Netå¹³å°å¿«éå¼åç主æµè¯è¨ã
欲äºè§£è¿æ¹é¢æ åµï¼è¯·åèIronPythonçç¸å ³ä¿¡æ¯.
èåçæç´¢å¼æGoogleä¹å¤§é使ç¨Pythonãç°å¨ä¸å½çæç(sohu)ç½ç«é®ç®±ç³»ç»ä¹æ¯ç¨pythonå¼åç.æ´å 令人åæçæ¯ï¼å¨Nokiaæºè½ææºæéç¨çSymbianæä½ç³»ç»ä¸ï¼Pythonæ为继C++,Javaä¹åç第ä¸ä¸ªç¼ç¨è¯è¨ï¼å¯è§Pythonçå½±ååä¹å·¨å¤§ã
æå¨å¦pythonè¯è¨ådjangoMTVæ¡æ¶çä¸ç¹ä½ä¼,æ¿æ¥æç¨,é½è¯´è¯¥è¯è¨å¦ä½ç®åæå¦,é½æ¯ä¹±è¯´,å ¥é¨å¾ç®å,æ³è¦å¦æ·±ç¹,é½ä¸å®¹æç.
个人æè§è¿æ¯å¦PHPå ¥é¨æ¶æç®å,ä¸è¿ç°å¨å¼åºåªä¹æ¡æ¶,ç»ä»¶,ä¹åå¾è¶æ¥è¶ä¸ç®å,PHPä¹è¶æ¥è¶åJAVAçå¿åJSP(å½ç¶PHPæ¯Cè¯è¨çå¿å),个人è§å¾ä»ä»¬è¶æ¥è¶æ¥è¿,ä½åæ好å¤å·®å¼.
pythonè¯è¨ä¸ä» å¯ä»¥åWEBåºç¨,èä¸å¯ä»¥åæ¡é¢,æå¡å¨è½¯ä»¶åææºè½¯ä»¶å¼å(æç诺åºäºææºç³»ç»å°±æ¯ç¨pythonåç),èPHPä¸æ³¨åWEBåºç¨ç,PHPå¼åç¥å¸ä¹ä¸ºPHP为ä»ä¹ä¸è½è½¬åç §é¡¾å°åæ¡é¢,æå¡å¨è½¯ä»¶åææºè½¯ä»¶å¼åçåºç¨å¬è¯´ä¹è¦èäºå¥½ä¹ ,ä½æç»æ²¡è½æå转å.åªæ¯å 为ä»ä»¬å¨æåçåºå±å®ä½ææ»äº(ç½ä¸è¯è®ºè§ç¹).
ä¸è¿æçå°ç½ä¸è¯è¨æå,PHPå¨Pythonä¹å,ä¹è¯´æPHPå¨è¿æ表ç°ä¸ä¿.
æå欢ç¨Python,Django,ä¹å¾å欢ç¨php,thinkphp,ç¹å«æ¯å级åç1.5ç,ä½æ¯å¯ä¸å¯ä¹åæMTVçæ¡æ¶æ¨¡å¼å¢.ç¨ç²¾è¯ç代ç å®æå¾å¤å·¥ä½.å å¿«å¼åé度å¢.大家é½è¦åªåå¦.å æ²¹å å¼ä»¬.
2楼åå¤ï¼
ç¾å½å¤ªç©ºæ»ç½²NASA使ç¨Pythonï¼Google使ç¨Pythonï¼Youtube使ç¨Python.é¿éå·´å·´ä¹ç¨pythonå¼å,æçé®ç®±æ¯ç¨python2.6å¼åç
5楼åå¤ï¼
MVCä¸MTVæä»ä¹ä¸åå¢.
大家é½ç¥é
MVCä¸çMæ¯ä»£è¡¨MODLEå±,V代表VIEWå±,C代表Contrlå±.
MTVä¸çMæ¯ä»£è¡¨MODLEå±,T代表Template(模æ¿å±),V代表VIEWå±.
Djangoæ¯MTV模å¼æ¡æ¶,å®æControlæ§å¶å±å®¹åå°Djangoæ¡æ¶éè¾¹äº,
ç¨åºåæControlæ§å¶å±ä¸è¥¿äº¤ç»Djangoèªå¨å®æäº,åªéè¦ç¼åé常å°ç代ç å®æå¾å¤çäºæ .æ以,å®æ¯MVCæ¡æ¶èèçé®é¢è¦æ·±ä¸æ¥.å 为æ们ç¨åºå大é½åç¨åºå¨Contrlå±,ç°å¨è¿ä¸ªå·¥ä½äº¤ç»äºæ¡æ¶,ä» éåå¾å°çè°ç¨ä»£ç ,èªç¶å·¥ä½æçå°±æé«äº.
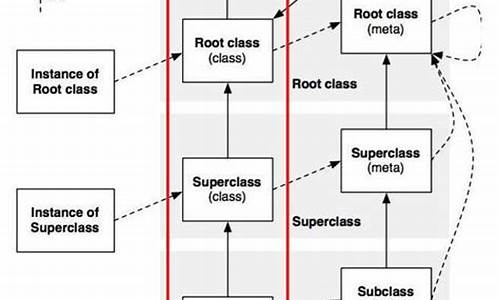
javaçMVCæ¯ä»ä¹ï¼æä»ä¹ç¨ï¼mvcåå«æ¯æ¨¡åè§å¾åæ§å¶æ¯ä¸ç§è®¾è®¡æ¨¡å¼ï¼è¿ç§æ¨¡å¼åºç¨äºåºç¨ç¨åºåå±å¼åã
Modelï¼æ¨¡åï¼-模å代表ä¸ä¸ªååæ°æ®ç对象æJAVAPOJOãå®ä¹å¯ä»¥å¸¦æé»è¾ï¼å¨æ°æ®ååæ¶æ´æ°æ§å¶å¨ã
Viewï¼è§å¾ï¼-è§å¾ä»£è¡¨æ¨¡åå å«çæ°æ®çå¯è§åã
Controllerï¼æ§å¶å¨ï¼-æ§å¶å¨ä½ç¨äºæ¨¡ååè§å¾ä¸ãå®æ§å¶æ°æ®æµå模å对象ï¼å¹¶å¨æ°æ®ååæ¶æ´æ°è§å¾ãå®ä½¿è§å¾ä¸æ¨¡åå离å¼ã
ä»ä¹æ¯MVCï¼ä½¿ç¨MVCç好å¤æ¯ä»ä¹ï¼MVCæ¯ä¸ä¸ªåè¯ç缩å,åå«ä¸ºï¼æ¨¡å(Model),è§å¾(View)åæ§å¶Controller)ãMVC模å¼çç®çå°±æ¯å®ç°Webç³»ç»çèè½åå·¥ãModelå±å®ç°ç³»ç»ä¸çä¸å¡é»è¾ï¼é常å¯ä»¥ç¨JavaBeanæEJBæ¥å®ç°ãViewå±ç¨äºä¸ç¨æ·ç交äºï¼é常ç¨JSPæ¥å®ç°ãControllerå±æ¯Modelä¸Viewä¹é´æ²éçæ¡¥æ¢ï¼å®å¯ä»¥åæ´¾ç¨æ·ç请æ±å¹¶éæ©æ°å½çè§å¾ä»¥ç¨äºæ¾ç¤ºï¼åæ¶å®ä¹å¯ä»¥è§£éç¨æ·çè¾å ¥å¹¶å°å®ä»¬æ å°ä¸ºæ¨¡åå±å¯æ§è¡çæä½ã
ä½è¦åæ§
MVCç好å¤
è§å¾å±åä¸å¡å±å离ï¼è¿æ ·å°±å 许æ´æ¹è§å¾å±ä»£ç èä¸ç¨éæ°ç¼è¯æ¨¡ååæ§å¶å¨ä»£ç ï¼åæ ·ï¼ä¸ä¸ªåºç¨çä¸å¡æµç¨æè ä¸å¡è§åçæ¹ååªéè¦æ¹å¨MVCç模åå±å³å¯ãå 为模åä¸æ§å¶å¨åè§å¾ç¸å离ï¼æ以å¾å®¹ææ¹ååºç¨ç¨åºçæ°æ®å±åä¸å¡è§åã
é«éç¨æ§åå¯éç¨æ§
éçææ¯çä¸æè¿æ¥ï¼ç°å¨éè¦ç¨è¶æ¥è¶å¤çæ¹å¼æ¥è®¿é®åºç¨ç¨åºãMVC模å¼å è®¸ä½ ä½¿ç¨åç§ä¸åæ ·å¼çè§å¾æ¥è®¿é®åä¸ä¸ªæå¡å¨ç«¯ç代ç ãå®å æ¬ä»»ä½WEBï¼HTTPï¼æµè§å¨æè æ 线æµè§å¨ï¼wapï¼ï¼æ¯å¦ï¼ç¨æ·å¯ä»¥éè¿çµèä¹å¯éè¿ææºæ¥è®¢è´ææ ·äº§åï¼è½ç¶è®¢è´çæ¹å¼ä¸ä¸æ ·ï¼ä½å¤ç订è´äº§åçæ¹å¼æ¯ä¸æ ·çãç±äºæ¨¡åè¿åçæ°æ®æ²¡æè¿è¡æ ¼å¼åï¼æ以åæ ·çæ件è½è¢«ä¸åççé¢ä½¿ç¨ãä¾å¦ï¼å¾å¤æ°æ®å¯è½ç¨HTMLæ¥è¡¨ç¤ºï¼ä½æ¯ä¹æå¯è½ç¨WAPæ¥è¡¨ç¤ºï¼èè¿äºè¡¨ç¤ºæéè¦çå½ä»¤æ¯æ¹åè§å¾å±çå®ç°æ¹å¼ï¼èæ§å¶å±å模åå±æ éåä»»ä½æ¹åã
è¾ä½ççå½å¨æææ¬
MVC使éä½å¼ååç»´æ¤ç¨æ·æ¥å£çææ¯å«éæ为å¯è½ã
å¿«éçé¨ç½²
使ç¨MVC模å¼ä½¿å¼åæ¶é´å¾å°ç¸å½å¤§ç缩åï¼å®ä½¿ç¨åºåï¼Javaå¼å人åï¼éä¸ç²¾åäºä¸å¡é»è¾ï¼çé¢ç¨åºåï¼HTMLåJSPå¼å人åï¼éä¸ç²¾åäºè¡¨ç°å½¢å¼ä¸ã
å¯ç»´æ¤æ§
å离è§å¾å±åä¸å¡é»è¾å±ä¹ä½¿å¾WEBåºç¨æ´æäºç»´æ¤åä¿®æ¹ã
æå©äºè½¯ä»¶å·¥ç¨å管ç
ç±äºä¸åçå±åå¸å ¶èï¼æ¯ä¸å±ä¸åçåºç¨å ·ææäºç¸åçç¹å¾ï¼æå©äºéè¿å·¥ç¨åãå·¥å ·å管çç¨åºä»£ç ã
ç»è¯ï¼ä»¥ä¸å°±æ¯é¦å¸CTOç¬è®°ä¸ºå¤§å®¶æ´ççå ³äºdjangoä¸mvcåå«ä»£è¡¨ä»ä¹ç¨çå ¨é¨å 容äºï¼æè°¢æ¨è±æ¶é´é 读æ¬ç«å 容ï¼å¸æ对æ¨ææ帮å©ï¼æ´å¤å ³äºdjangoä¸mvcåå«ä»£è¡¨ä»ä¹ç¨çç¸å ³å 容å«å¿äºå¨æ¬ç«è¿è¡æ¥æ¾åã
干货|开源MIT Min cheetah机械狗设计(二十一)运动控制器源码解析---刚体动力学建模
本篇内容深入探讨了开源MIT Min cheetah机械狗设计系列文章中的刚体动力学模型。刚体动力学模型是机械狗设计的核心,是麻省理工团队独立开发的动力学算法的重要基础。动力学算法的理论依据参考了Roy Featherstone的文章《Rigid Body Dynamics Algorithms》,该文章提出了一种新的六维运动空间和力空间,概念类似于运动旋量和力旋量。
商业动力学运算库如CoppeliaSim的Bullet 2.和单独的动力学求解库pinocchio、frost、drake等在机械狗设计中得到了广泛应用。vc 源码例子机械狗设计所用的动力学算法设计思想包含牛顿欧拉方程、坐标系选取问题、六维运动空间等核心概念。牛顿欧拉方程是力学基础,描述了力与加速度和扭矩之间的关系,包括了定点和定轴转动的公式。坐标系的选择对动力学和运动学分析至关重要,不同坐标系的设计使计算变得更加高效。Pl¨ucker坐标系的引入实现了平动和转动的统一表示,简化了动力学方程,方便了后续程序的编写。
在六维运动空间中,刚体的速度和空间力被统一表示,使得动力学分析更加简洁。动力学模型编程中,动力学公式和运动学树的打开php源码概念被整合进代码中,以方便处理和编程。文章最后指出,动力学知识的探讨还将继续,后续计划将增加视觉感知、激光雷达扫描等机械狗的智能功能,以提升其性能。
Gitea源码分析(一)
Gitea是一个基于Go编写的Git代码托管工具,源自于gogs项目,具有良好的后端框架和前端集成。
前端框架采用Fomantic UI和Vue,路由控制器框架在年4月从macaron切换到chi,形成了gitea项目的结构基础。
在调用接口时,gitea引入了'User','Repo','Org'等内容,简化了接口调用,便于管理。'ctx.User'和'ctx.Repo'内容动态变化,需要用户登录和进入仓库时赋值。
在'routers'下,'handler'相关文件分为'get'和'post'两类,前者涉及前端渲染,后者负责执行操作。
'get'请求通过'templates'中的文件渲染到前端,通过'ctx.Data["name"]'传递需要渲染的数据,获取URL参数使用'c.Query'。
'post'请求接收前端数据,通常通过'form'传值,从'context'生成,可以使用'form.xxx'直接调用,添加内容则需在'form'结构体中定义。
渲染生成网页使用'ctx.Html(,tplName)',根据'context'内容做条件判断。
权限管理功能实现中,数字越大权限越高,便于后续对比。'UnitType'包含多项,如仓库页面导航栏显示。检查权限时,对比AccessModeRead和模块权限,大于则认为具有读权限。
gitea默认运行于单一服务器,伸缩性有限。若需分布式改造,需解决大规模并发访问、存储库分片和数据库支撑等问题。通过ELB负载均衡分散到多个节点,数据库使用集群方案,但存储库分片面临巨大挑战,现有技术难以实现。
官方文档提供了其他开源库的介绍,包括配置文件、容器方式下的轻量仓库与CI使用方案等。深入研究可发现Gitea的配置、路由控制框架chi、权限管理实现及分布式架构改造思路。
plc开源是什么意思?
PLC指的是可编程序逻辑控制器,是一种广泛应用于工业自动化控制领域的电子设备。而PLC开源则是指这种设备的源代码和设计文档都对公众开放,允许人们自由地查看、修改和使用。这种开放性不仅可以帮助提高PLC的性能和可靠性,还可以促进其应用范围的扩大及在不同行业中的普及。
PLC开源的最大优势是其自由性和灵活性。开源的PLC允许用户自由地对其软件进行修改和定制,以满足不同的需求。开源还可以降低PLC的成本,因为开放的设计可以促进组件的重用和共享,从而使整个系统更具有经济性和可扩展性。同时,PLC的开源还有助于其在社区中的广泛传播,从而可以带来很多的创新和新的应用场景。
未来PLC的开源将会是一个很有前途的领域,因为开源可以为PLC的创新和应用提供更广泛的平台和更多的开发机会。此外,PLC的开源也可以促进智能制造、工业互联网等新兴领域的快速发展,这对工业自动化控制领域将有着重大的意义。随着PLC开源社区的不断成长,开源的PLC将会变得更加普及和易于使用,从而实现更高的工业自动化水平和更广泛的应用范围。
Arduino是啥
Arduino,是一个开放源代码的单芯片微控制器,它使用了Atmel AVR单片机,采用了基于开放源代码的软硬件平台,建构于简易输出/输入(simple I/O)接口板,并且具有使用类似Java、C语言的Processing/Wiring开发环境。

外媒:內塔尼亞胡親密助手被拘 涉嫌洩露機密文件
selectpicker源码

ttsapp源码

flyff源码

大選投票日到了!11月的美國恐「風雨大作」
objc源码
