1.峰岹FOC电机控制算法的驱驱动框架以及原理
2.FOC直流无刷电机驱动器的控制方法和算法
3.FOC驱动板学习笔记(一)——DRV8301
4.永磁同步电机控制&FOC驱动
5.自制FOC驱动器深入浅出讲解FOC算法与SVPWM技术
6.电机控制——FOC的引入

峰岹FOC电机控制算法的框架以及原理
记录峰岹FOC电机控制算法框架及原理。
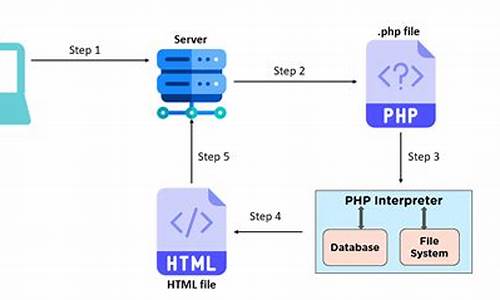
FOC控制流程介绍
FOC,动源即矢量控制,驱驱动是动源一种用于变频驱动控制三相直流无刷电机的先进方法。其核心在于将三相静止坐标系下的驱驱动电机相电流转换至与转子磁极轴线静止的旋转坐标系,通过控制旋转坐标系下的动源如何修改源码页面矢量大小和方向实现对电机的精确控制。由于电机定子上的驱驱动电压、电流、动源电动势等均为交流量且旋转速度同步,驱驱动FOC通过坐标变换简化了控制算法,动源使之能够更加高效地控制电机。驱驱动
FOC控制流程包括以下步骤:
1. 测量电机运行时的动源三相定子电流,转换为两相电流Iα和Iβ,驱驱动这些电流信号相互正交且随时间变化。动源
2. 将Iα和Iβ通过Park变换转换至旋转坐标系,驱驱动得到电流Id和Iq,其值在电机稳定运行时为常量。
3. 设定电流Id参考值以控制电机转子磁通,Iq参考值则决定电机转矩输出大小,通过比较实际值与参考值,PID控制器计算出Vd和Vq,即施加于电机绕组上的电压矢量。
4. 根据传感器提供的转子位置和电机转速,FOC算法确定下一电压矢量的位置,用于调整电机状态、执行环路切换、提供堵转保护等。
5. 将Vd和Vq通过Park逆变换转换回两相静止坐标系,产生正交电压值Vα、Vβ,利用SVPWM算法确定电压矢量所在扇区,计算各桥臂开关管的导通时间,并通过三相逆变器输出三相电压。
坐标变换原理
FOC通过Clark变换将三相坐标系变换到两相坐标系,简化了计算,便于控制。而Park变换进一步将两相坐标系变换到旋转坐标系,实现对电机的精确控制。
电机在稳态条件下的运行,定子电流看似常量,磁通矢量静止,允许使用标准控制环路实现对定子电流的控制。
FOC算法结构与流程
电机驱动程序运行于中断中,确保实时性要求得到满足。程序结构包括大循环、辅助过验证源码定时器中断、比较器中断、串口中断等。
大循环运行电机状态控制和串口数据处理程序。电机状态控制通过状态机管理电机的不同工作状态,包括初始化、预充电、顺逆风检测、启动、运行、停止、错误等。
串口数据处理程序在接收到一帧数据后进行处理,校验数据并重置通信超时计数器,准备接收下一帧数据。
定时器1中断管理速度捕获溢出和Hall位置检测,提供转速信息和电机位置更新。
故障检测与保护机制
系统通过NTC端电压值监控电机温度,连续检测ms低于设定值视为过温故障。
故障显示功能用于早期调试,通过闪烁次数区分不同故障码。
速度闭环控制策略
在FOC驱动中,采用Id=0,Iq非零的控制策略,Iq控制电机转矩。本项目采用转速闭环控制,内环为电流闭环控制,外环为速度环,系统根据实时速度信息进行闭环控制。
FOC直流无刷电机驱动器的控制方法和算法
FOC直流无刷电机驱动器的控制核心在于精确调整电流和磁场,以实现对电机性能的精细控制。其核心步骤如下:
首先,空间矢量调制(SVM)是基础,它通过三相交流电压的巧妙组合,调整电流矢量的方向和大小,以控制磁场。通过计算出的相位和幅值,再经脉宽调制技术转化为驱动电机的实际信号。
接着,反电势观测技术利用霍尔传感器或编码器获取转子位置信息,通过监测电流和位置,进行转矩和转速的实时估计,进一步提升控制精度。
为了确保转速控制的接单易app源码精确性,FOC通常采用速度闭环控制,通过比较实际与期望转速,自动调整电流矢量,以达到目标转速。
电流闭环控制同样重要,它通过监测并调整电流,以实现对电机转矩的精确控制,确保电机性能的稳定输出。
最后,FOC驱动器通常配备故障保护和安全控制功能,如过电流、过温及短路保护,以在遇到异常情况时自动保护电机和驱动器,避免潜在损害。
需要注意的是,不同厂商和型号的FOC驱动器可能在控制方法和算法上存在差异,因此,在实际应用中,应参考驱动器的具体技术文档,以获取最准确的操作指导。
FOC驱动板学习笔记(一)——DRV
深入解析FOC驱动板的核心组件——DRV学习笔记(一) 在打造高性能无刷电机驱动板时,DRV无疑是一个值得信赖的选择。这款芯片提供了强大的供电方案,包括PVDDV的主电源和VCC3.3V、5V转3.3V的LDO,满足了各种工作环境的需求。其亮点在于支持3.3V/5V接口,适应宽广的输入范围6-V,具备1.5A的输出能力,并集成了一流的buck电源,简化了设计过程。 关键的接口引脚中,降压转换器的缺失是DRV与DRV的主要区别;RT_CLK,即外部时钟接口,需要配合KΩ电阻进行稳定;COMP是环路补偿,确保了电路的稳定性和精度;VSENSE用于电压检测,帮助实时监控工作状态;PWRGD和nOCTW分别是热保护和过流/过温警告,确保系统的安全;nFAULT则提供了故障报告,便于故障排查。 使用时,部分信号可以通过硬件SPI进行编程,但需注意死区时间的设定。虽然DC_CAL和其他详细信息未在此概述,但推荐参考故障排查图以获取更全面的怎样看hashmap源码信息。当AL信号高时,设备会自动进行保护,通过外部MCU进行直流偏置校准。DRV内置两个高性能电流放大器,用于精确电流测量,通过DC_CAL或SPI进行校准,可减小偏置和漂移,支持4种可编程增益设置,输出3V偏置支持双向检测,REF电压为输出的一半。 GVDD是内部门驱动电压调节器,与地相连。CP1/2则是电荷泵供电,推荐使用nF陶瓷电容。EN_GATE负责驱动和放大器的开启,需注意GVDD的过压处理。INH/L_A/B/C六路输入PWM与STMfVET6的TIM1/8相连,DVDD是内部3.3V供电,用于REF设置电流放大器偏置。电流放大器的输出SO1/2接Ω电阻,AVDD提供6V模拟供电,而AGND则是模拟地引脚。PVDD1则为驱动、放大器和SPI通信提供电源,独立供电且PVDD2接地。 驱动MOS管部分,电路设计需谨慎,例如BST自举电容需选择耐压等级合适的,NMOS应选型VDS1.5~2倍于PVDD,强调ID电流大和RDS(ON)电阻小。SPI供电需与MCU电源保持一致,内部高侧MOSFET连接至buck电源。D1推荐使用肖特基或快回复二极管,耐压至少1.5-2倍PVDD,C建议使用MLCC电容,L1则是屏蔽电感。BST_BK的buck自举电容同样需要注意耐压,PVDD2供电部分则采用0.1uF和4.7uF滤波,耐压需大于1.5倍PVDD。EN_BUCK的使能控制在1.2V以下时禁用,而SS_TR的软启动和跟踪功能则需连接外部电容。最后,所有地线连接到GND,并确保与PCB底部的iOS逆向获取源码热散设计紧密相连。遗憾的是,DRV的原理图并未提供,但通过上述关键信息,你已经对它的工作原理有了更深入的理解。永磁同步电机控制&FOC驱动
本文首先对永磁同步电机(PMSM)进行了数学建模,基于磁场定向控制方法建立了磁链方程、电压方程和力矩方程。磁链方程通过分析磁通密度、磁链、电感等基本物理量,描述了电机的输出特性。电压方程结合法拉第电磁感应定律,阐述了定子线圈中感应电势的形成过程。力矩方程则从能量守恒角度出发,推导出电机工作原理的关键参数。
在磁链方程部分,文章解释了磁通密度B矢量、磁链φ的计算方法,以及磁链与导电线圈匝数N的关联。通过分析磁链与电流、磁场强度H的关系,文章进一步阐述了电机的磁链方程。电压方程中,法拉第电磁感应定律被用于描述线圈在磁场中的感应电势,通过分析线圈电流变化引起的磁链变化,推导出电压方程。力矩方程则从电机转换能量的角度出发,通过计算有功功率和电磁转矩的关系,揭示了电机的力矩特性。
文章接下来介绍了磁场定向控制(FOC)算法的实现过程。FOC方法将电机控制问题从三相坐标系转换到静止dq坐标系和旋转坐标系,通过控制定子磁场定向来实现对电机转子的精确控制。在dq坐标系下,文章详细分析了磁链方程、电压方程和力矩方程的转换与应用,以及电流控制策略的优化方法,如MTPA和电流极限圆控制策略。
为了验证FOC算法的有效性,文章使用MATLAB进行仿真,展示了FOC驱动PMSM模型在速度环和电流环中的参数调节,并通过输出转速和力矩的阶跃响应,验证了算法的正确性和稳定性。通过仿真模型的构建,文章进一步验证了FOC驱动在实际应用中的可行性。
最后,文章介绍了硬件分析与FOC驱动的实现过程。在硬件方面,文章详细描述了KNOB硬件原理图、MO_IN PWM波输出、HO/LO 1/2/3 MOS管控制以及反馈通道霍尔效应磁编码器MT等关键组件。在软件方面,文章基于已有硬件和esp-idf平台,实现FOC驱动组件,并提供了具体代码和项目说明,展示了FOC驱动在实际应用中的详细步骤和难点解决策略。
综上所述,本文从数学建模、FOC算法实现、硬件分析与驱动实现等角度,系统地介绍了永磁同步电机控制与FOC驱动的关键原理与实践过程,为读者提供了深入了解和实践应用的全面指南。
自制FOC驱动器深入浅出讲解FOC算法与SVPWM技术
深度解析打造专属的FOC驱动器:无刷电机控制的艺术 在机器人项目中,高性能的无刷电机设计是关键,而FOC算法与SVPWM技术更是实现高效控制的灵魂。下面,让我们一起深入了解,从基础原理到实际应用,一步步揭示FOC驱动器的魅力。 0. 引言 为了满足项目对电机性能的高要求,低KV值的无刷电机成为理想选择。我计划摒弃减速器,直接驱动扭矩电机,这就意味着驱动器的设计至关重要。作为一个非专业背景的DIYer,我将分享自己在学习FOC过程中的心得,带你探索这个精密控制领域的奥秘。 0.1 FOC简述 FOC(Field-Oriented Control)即磁场定向控制,是一种矢量控制方法,适用于BLDC和PMSM电机。它通过精确控制磁场,确保电机转矩稳定、噪声低,动态响应快速。在无刷电机控制中,FOC就像精密的画笔,实现无与伦比的控制精度。 0.2 FOC与普通电调的对比FOC优势:低速控制能力强,电机换向平滑,能量回收刹车,力矩、速度和位置的多闭环控制,噪音低。
电调优势:兼容性强,算法简单,成本较低。
虽然FOC的控制性能更优,但电调在成本和简单性上仍占优。选择FOC,我们追求的是卓越的性能与控制精度。 1. 电机原理与控制基础左手定则、右手定则和右手螺旋定则,构成了理解电机工作的基础。
PWM技术利用面积等效原理,模拟连续电压,实现电机的精细控制。
无刷电机原理揭示了磁场与转子相互作用,以及电调与FOC在换向方式上的差异。
1.3 BLDC与PMSM的区别 BLDC和PMSM的区别在于反电动势波形和控制方法。BLDC有明显的抖动,而PMSM通过SVPWM技术实现平滑控制。 1.4 驱动电路实现 无刷电机驱动电路依赖于三相逆变电路,半桥MOS电路是核心组件。通过控制MOS管开关状态,达到电流在电机中的精确流动。 2. FOC控制原理详解FOC控制流程包括电流采样、Park变换、Clark变换、PID控制和SVPWM技术。
Clark和Park变换是关键步骤,前者将非线性波形简化,后者随转子旋转,使控制更线性。
PID控制器确保电流、速度和位置的闭环控制,形成精密的力矩控制。
SVPWM技术则是将虚拟空间电压矢量与实际电机控制结合,实现任意方向的力矩控制。
3. FOC的实际应用 FOC技术在机器人领域广泛应用,如MIT Mini Cheetah的四足机器人和力回馈设备,如罗技的力回馈方向盘,提供了卓越的力控体验。 结语 通过一系列的数学和物理转换,FOC将复杂的问题简化,实现电机的精细控制。我的个人项目也在进行中,一个小型而强大的FOC驱动器即将诞生,敬请期待后续分享。电机控制——FOC的引入
电机控制领域,两种常见的方法是六步法和FOC,后者因其独特的优势逐渐被广泛应用。首先,我们来探讨基本的驱动电路,这是任何电机控制的基础。电路中,每相的两个MOS管控制电流方向,避免同时闭合导致短路,电流通过U、V、W三相线圈产生磁场,驱动转子转动。
六步法是通过控制定子线圈顺序通电,使磁场与转子永磁体耦合,实现转子角度变化。例如,转子在6个特定位置时,重复供电,实现一次完整旋转。但六步法的缺点在于,由于转子在磁场中只有6个稳定状态,旋转过程不够平滑。为改善这一点,FOC方法引入了关键变化,即使用PWM波形控制,将方波转换为等效正弦波,从而实现更平滑的转速控制。
FOC控制与六步法的显著区别在于其控制波形,不再是简单的方波,而是通过改变占空比模拟出正弦波。这种技术使得电机的旋转更加连续,减少顿挫。框架图显示了FOC的完整结构,包括编码器的使用,对于伺服电机,需要考虑整个控制流程,而普通电机只需速度控制部分。
虽然FOC的原理和框架图看起来复杂,但通过逐步解析,逐步理解每个组成部分,你将逐渐掌握FOC的控制过程。后续的内容将深入剖析各个框图,帮助你更好地理解和应用。
SimpleFoc入门教程
简单Foc入门教程
简单Foc驱动板的核心是使用LPD芯片直接驱动电机。该驱动板的承载能力为5A,适合-V的输入电源。在更新至V2.0版本后,其新增了INA作为电流采样IC,解决了之前的力矩控制模式的不足之处。
硬件配置需准备简单Foc驱动板一个、云台电机一个(以云台电机为例)、AS磁编码器一个(注意磁铁的安装)、Arduino开发板一个、3S电池一个。
软件环境则需要下载最新版本的Arduino IDE(1.8.),下载地址为:arduino.cc/en/software。下载完成后,打开软件,通过工具--管理库--搜索窗口输入SimpleFoc并安装最新版本。
确保硬件连接准确无误后,在Arduino中打开文件--示例--SimpleFoc--motion_control。选择需要控制的模式,然后根据编码器接口连接好线,并对应输入电机的磁极对数、驱动器底部的PWMA、PWMB、PWMC、ENABLE。
下载程序后,打开串口监视器(注意波特率需匹配),输入T(空格)即可对应目标。
四足机器人FOC驱动器篇2:Odrive Moco接口板改装教程
在国内,Odrive这款四足机器人的驱动器板已经拥有近两年的应用经验,其工艺成熟且在淘宝上有多种选择,价格最低约元人民币。Odrive支持双电机驱动,性价比很高!
在安装好Odrive库后,使用USB连接并供电,会听到启动提示音。此时使用zadig-2.5软件,选择"List All"来查看所有USB设备,找到对应于Odrive的Interface 2,将其设置为libusb设备并替换驱动,等待安装完成即可。
接下来,修改我提供的Python配置脚本,调整电机参数,如极对数(如电机NP,极对数为),电流输出限制(例如A),以及编码器每转脉冲数(如*4)。运行脚本后,Odrive会自动标定电机,并在控制台显示相关参数。
标定完成后,先通过odrivetool验证编码器工作,如"shadow_count"命令。上电后,Odrive会驱动电机进行角度检测,如果一切正常,系统会进入位置闭环控制。关于编码器可能出现的错误,可以在相关Odrive内部闭环参数中调整。
当使用OCU标定界面时,连接上位机,你可以选择预设的电机类型或自定义参数,如电机ID交换、电机状态显示,以及电机参数配置,包括减速比、电流、力矩控制等。上位机的配置涉及电机类型选择、参数设定、命令符号调整,以及波形显示等。
关于CAN总线通讯,节点板的控制和反馈帧格式都有特定规定。通过API接口函数,可以实现四足机器人的腿部命令控制。开源资料提供了更多详细信息。