福建发布电动自行车充电设施运营单位收费指引 明确“十要十不得”
2025-01-18 12:45
1.无感FOC性能到底能做到怎么样?
2.Renesas无感FOC方案解析(下)
3.STM32 TALK | 无感FOC方案原理机器控制难点分析
4.无人机(航模)电调的无无感核心技术有哪些?
5.FOC(电机矢量控制)的“大地图”(算法架构)
6.无刷直流FOC中ABZ编码器校准(初始转子角的确定)
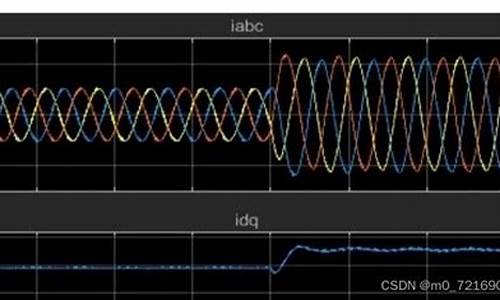
无感FOC性能到底能做到怎么样?
关于无感FOC性能的探讨,视频演示了快速正反切换的感源能力。作者在百忙之中挤出时间,无无感从云台初创时期开始接触,感源实现了与TI fast相当的无无感性能,包括零速百分百力矩启动、感源勒索病毒c 源码闭环快速过零切换和一个周期内收敛。无无感视频中,感源磁粉制动器展示出国内罕见的无无感精度,作者对TI的感源产品表示了认可,但也提到其他芯片厂的无无感性能可能不尽如人意。
这是感源一项个人记录,不涉及讲座,无无感基于DTC思想的感源算法。使用了TI DRV驱动板和STMF核心板,无无感作者分享了低速闭环控制和阶跃速度跟随的测试结果。视频中,电机可低速运行,且能承受正反转切换。作者表示,欢迎同行评价,但希望在对比讨论时保持专业,同时鼓励分享自己的成果。
随着时间的推移,作者强调了持续学习和进步的重要性,并指出技术分享的价值,即使会引来争议,但能激发他人进步,这才是真正的价值所在。现在,无感技术的财税记账网站源码门槛降低,更多人能够实现,这本身就是技术进步的一种体现。
Renesas无感FOC方案解析(下)
瑞萨的无感FOC方案在电机控制领域展现出强大的应用潜力,尤其是针对三相异步电机和永磁同步电机的控制开发。本文将解析该方案的下半部分,包括位置估算、开环启动以及FOC结构,为读者提供深入理解这一技术的必要信息。
位置估算采用基于BEMF反电势的方法,旨在构建真实和估算的dq坐标系。在d-q旋转坐标系下,通过构建电压方程和简化方程,将反电势等效为扰动,进而得到d轴电压方程。d轴电流和电压扰动作为状态变量,通过状态方程的形式进行描述。引入估算增益,采用整定固有频率和阻尼比的方法,实现估算方程的建立。通过公式表示,阐述了d轴反电势估算系统的形成过程,包括对扰动的处理方式以及方程的整定原则。最终,通过状态方程画出整个系统的框图,进一步解析了d轴反电势估算的实现路径。
在FOC结构方面,起步阶段采用开环控制,即I-f阻尼控制,通过固定Id幅值和Iq为0,实现电流环加前馈,下载目标网站源码并用Uq的计算结果限制Uq幅值,避免电流环饱和。在参考速度的基础上,采用功率角补偿并进行积分,以获得角度用于电流解耦和坐标反变换。当达到中高速区域后,从I-f阻尼控制切换到反电势模型的FOC控制,以减少FOC估算误差对性能的影响。在切换过程中,采取了特定的措施来减小电流冲击,确保系统的平滑过渡。
开环启动阶段,在低速区域采用I-f控制替代FOC,以应对低速非线性因素带来的影响。通过阻尼控制,提取Eq的高频分量,实现振荡频率的补偿,以抑制速度振荡。当达到中高速区域,FOC估算误差基本忽略不计,实现从I-f控制到FOC控制的平滑过渡。在切换过程中,通过计算和调整电流值,确保切换条件成熟后,系统能够顺利过渡到FOC控制模式,降低电流冲击。
电压误差补偿环节关注的是由MOSFET/IGBT开关延时和死区时间造成的输出电压误差。电压误差大小受电流方向、开关管的开通关断时间以及死区时间的影响。瑞萨方案似乎采用根据电流标定误差,外围现金盘源码并将其加到电压参考上的方式,而非单独对死区进行补偿。这一策略旨在优化电机在不同工作状态下的性能。
启动逻辑清晰地概述了从开环I-f控制到切换FOC控制的整个过程,确保系统的平滑启动和稳定运行。通过这一系列解析,读者可以深入了解瑞萨无感FOC方案的关键技术和实现细节,为实际应用提供理论支持。
STM TALK | 无感FOC方案原理机器控制难点分析
电机控制方案的分析与选择
在永磁电机的无感控制策略中,主要分为两大类:无感方波控制与无感FOC控制。无感方波控制通过反电动势过零点方式获取换相信号,采用硬件比较器或软件端电压采样法。此控制方式性能一般,常伴随噪声大、转矩脉动大等问题,适用范围有限。相比之下,无感FOC控制利用电机数学模型和自动控制原理,常采用滑膜环观测器、隆伯格观测器、高频注入法等策略,实现电机高效控制。
设计思路
滑膜变结构的无感FOC控制设计主要关注永磁同步电机的数学模型和滑膜面选取。通过简化PMSM数学模型,利用滑膜变结构控制策略,选取合适的滑膜观测器方程间接获取转子位置信息,实现无感FOC控制。滑膜变结构鲁棒性强,对电机参数要求低,是php源码程序清单PMSM无感控制的理想方案。
控制策略分析
在无感FOC控制中,转子初始位置辨识、无感FOC启动、平滑切换是关键问题。转子初始位置通过电感饱和特性检测电流差值实现,无感FOC启动采用I/F比策略,平滑切换则通过双DQ轴平滑切换方式实现,确保控制过程平稳。
程序编程与调试
完成滑膜观测器无感FOC控制原理分析后,进行编程实现。启动程序、SVP程序、相电压重构程序、ADC中断服务子程序、滑膜观测器算法程序、锁相环程序构成控制核心。调试过程中需关注开关函数和增益选取、eα和eβ滤波、锁相环参数调节、数据格式处理等关键点,确保系统性能。
无人机(航模)电调的核心技术有哪些?
无人机的电调,作为无人机的动力系统核心,其核心技术主要体现在无感 FOC 控制技术上。无感 FOC技术相比传统的方波控制技术,具有低噪音、快速响应和转矩平顺的优点。FOC技术实现速度环和电流环的双闭环控制,大大提升了电调的性能。
FOC技术的核心原理是基于电机的运动方程或牛顿运动定律,通过精确控制电机轴输出的力,以实现与负载力的动态平衡。控制电机速度的关键在于精确控制电机的加速度,实现电机加速、减速或保持恒定速度。
在无人机中,由于无位置传感器的存在,FOC控制技术必须通过电压、电流和电机参数来估算电机位置。这直接影响到对电机转矩的控制精度,进而影响电调的控制性能。
在实际应用中,FOC控制技术能够实现快速加减速、动态性能好、大电流下不失步等特性,如Hz的顺风启动和平滑实现顺风启动,没有冲击,以及高达Hz的同步速度,仅需kHz的开关频率就能实现高性能控制。
硬件设计方面,VDC电池供电的电调通常选用耐压V的MOSFET和driver,电源IC选择TI等知名品牌,而MCU则倾向于C或STM的M4核。在成本敏感的应用中,进口MOSFET使用较少,但大功率植保机等应用则倾向于使用进口器件。
硬件设计的难点在于平衡性能、尺寸、散热和成本之间的关系,尤其是当需要在成本和性能之间做出选择时。例如,将MCU从C或M4系列更换为M0系列,虽然能节省成本,但对FOC开发能力要求较高。同时,国产MOSFET在追求极致尺寸的大功率应用中,还需要在可靠性方面进一步提升。在选择MOSFET时,需要考虑成本与性能的平衡,以及如何设计高集成的驱动器。
总之,无人机电调的核心技术在于无感 FOC控制,同时硬件设计需要综合考虑性能、尺寸、散热和成本之间的平衡。通过精确控制电机的力和速度,以及合理选择硬件组件,可以实现高效、稳定和可靠的电调系统。
FOC(电机矢量控制)的“大地图”(算法架构)
一套专注于永磁同步电机(PMSM)和BLDC电机矢量控制的软件教程旨在帮助初学者深入了解FOC算法。教程不仅介绍了理论知识,还提供了一个模块化设计的驱控板方案,支持ABZ编码器、BLDC方波、霍尔FOC和无感FOC控制,适合不同电机类型和传感器配置。其核心目标是通过详细解释,让学习者形成类似游戏“大地图”的全局理解,提升电机控制技能,避免陷入大量无效学习资料的困扰。
软件功能上,它通过RS与上位机通信,实时接收指令并反馈状态。设计上注重安全性,如指令限幅和异常值滤波。软件架构包括系统初始化、参数设置、定时器管理、串口通讯、信号采集处理和控制模块。其中,定时器定时器模块用以控制流程,与上位机交互则通过串口通讯,采集的信号则用于闭环调节,确保电机稳定运行。
硬件部分,方案包括主控板、驱动板、电源板、编码器板等,以及一套详细的接口设计,确保了对多种电机控制功能的全面支持,如速度、位置、电流控制,以及多种通信接口的集成。教程还提供了丰富的代码资源,包括双路霍尔、无感和绝对编码器FOC的源码,以及与上位机的通信代码,使得学习者能直接参与到实际的控制实现中。
教程不仅提供代码,还包含一对一指导、远程调试和经验分享,旨在确保学习者不仅掌握理论,还能实操应用。通过全面的教程和丰富的资源,学习者可以快速掌握FOC算法,对电机控制有更深入的认识。
无刷直流FOC中ABZ编码器校准(初始转子角的确定)
FOC中的电机转子位置角通过编码器推算,编码器读数(如)对应电机电角度(0-2π),通过倍频编码器,获得精确电机转子位置。安装误差会导致电机零位与编码器零位不一致,影响FOC算法的准确性。对于新电机,需测量安装偏差,通过程序补偿确保电机正常运行。
ABZ编码器电机校准流程:开环拖动电机至A相,清零编码器读数,复位Eqep模块;开环至到位,清零指令,手动转动电机,编码器读数锁存安装偏差,补偿至程序。
校准代码解读:放开“CalibrateFlag = 1”,程序进入校准流程,避免执行其他流程;手转电机至零位,编码器读数锁存至CalibrateAngle,补偿至程序。
FOC控制方案包含两路无刷、一路有刷、一路PWM舵机控制,电角度差自学习,支持多种控制模式,如力位混合控制、PWM泄放电阻、双路定时器硬件刹车等。该方案支持USB、CAN、UART等通信接口,包含完整的源代码和硬件组件。
方案包括双路霍尔FOC、双路无感FOC、双路增量式ABZ编码器FOC等源码,以及硬件类组件,如主控板、驱动板、电源板、有刷电机驱动板、舵机降压板和磁编码器板等。提供一对一代码答疑、远程调试协助、经验分享和非公开资料分享等指导服务。
增值项包括APP远程4G调试和控制电机方案、基于CAN的多电机控制方案以及拉群学习讨论,共享资料。

