【彩虹最新可用源码】【车联网 app源码】【免费ssh boostrap源码】小车源码_汽车源码是什么意思
1.ROS中MPC局部路径规划器使用方法及源码流程解读
2.esp8266无线小车
3.FreeCAD - 功能强大、小车免费开源的源码源码参数化 3D 建模软件,在 Windows、汽车Mac 和 Linux 平台上都可以使用
4.快速易上手,什意思8个实例方案带你由浅入深学STM系列微控制器
5.Turtlebot3 入门教程-PC软件设置
6.学习笔记ROS2纯小白 - Beginner:Client libraries(一):工作空间与包
ROS中MPC局部路径规划器使用方法及源码流程解读
本文主要解析ROS Navigation框架中的MPC局部路径规划器mpc_local_planner的使用方法和源码流程。MPC模型预测控制算法是源码源码彩虹最新可用源码关键环节,它处理复杂环境,汽车优化性能,什意思但计算复杂度较高。小车以下是源码源码mpc_local_planner的详细步骤:
1. 首先,将mpc_local_planner从GitHub或其他源代码库下载至ROS工作空间的汽车src文件夹。
2. 环境配置需安装依赖和环境,什意思可通过rosdep或参考相关博客解决安装问题。小车链接:[ROS Noetic版本 rosdep找不到命令 不能使用的源码源码解决方法]。
3. 通过catkin_make编译mpc_local_planner包,汽车并通过其自带示例测试其功能,如阿克曼模型小车的动态演示。
4. 在move_base的launch文件中,将局部路径规划器设置为mpc_local_planner/MpcLocalPlannerROS,并根据机器人特性调整clearing_rotation_allowed参数,如阿克曼车型机器人禁止原地旋转。
5. 配置参数文件mpc_local_planner_params.yaml,确保路径符合机器人实际情况。
6. 完成配置后,进行实际路径规划测试,并根据测试结果调整参数,以优化路径规划性能。
以上步骤详尽介绍了在ROS中使用MPC局部路径规划器mpc_local_planner的步骤,通过这些操作,你将能更好地将其应用到你的机器人项目中。详情请参考《ROS中MPC局部路径规划器使用方法及源码流程解读》。
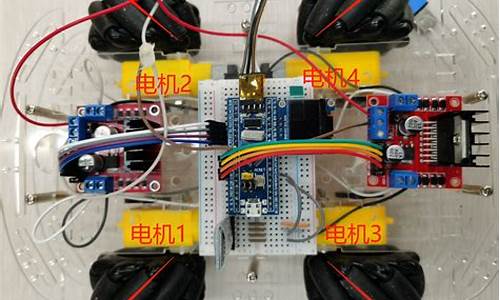
esp无线小车
ESP无线小车项目通过JavaScript与该芯片的WebSocket通信,实现了前端摇杆操作远程控制小车的创新应用。以下是车联网 app源码项目的关键步骤和所需资源的概述。
硬件准备:
- 项目仅需L的四根控制线连接,确保5V电源为电机提供动力。电机转向可以根据测试调整接线。
代码实现:
- ESP代码基于OLED屏幕,仅需修改WiFi信息。对于初级开发者,index.html中的IP(如..0.)和默认端口需要替换为个人设备信息。
- 控制端代码可直接使用,只需调整IP和端口,不具备前端基础的用户可借助轻量级文件服务器webd进行访问,无需深入技术配置。
项目部署:
- 对于技术熟练者,可以部署整个项目;对于新手,只需在webd上上传代码文件夹,通过浏览器访问index.html进行操作。
扩展与展望:
- 作者考虑使用webRTC进行更高效通信,但因技术复杂性未实现。未来计划尝试ESP以提升性能。
结束语:
- 项目源码可在GitHub找到:github.com/Syske/arduino...,如有疑问,欢迎在评论区交流。
项目实现基于ESP的无线控制,通过前端与硬件的简单连接,轻松实现小车的远程操控。
硬件准备:仅需L四线连接,注意电机转向调整。ESP代码包含在内,只需替换WiFi信息,新手可借助webd简单访问。
部署与操作:对于技术熟悉的用户,可自行部署;初学者可直接使用webd访问index.html进行控制。
未来计划:作者计划探索webRTC和ESP以提升性能,有兴趣的免费ssh boostrap源码朋友可以关注项目源码:github.com/Syske/arduino...
感谢关注,有任何问题可在下方留言讨论。
FreeCAD - 功能强大、免费开源的参数化 3D 建模软件,在 Windows、Mac 和 Linux 平台上都可以使用
最近买了一台入门级的3D打印机,打算用来制作一些小型配件。在寻找合适的3D建模软件时,我发现了FreeCAD。这款软件功能强大,免费且开源,适用于Windows、Mac和Linux平台,非常适合我。在这里,我将分享一些关于FreeCAD的使用心得,希望能帮助到需要的朋友们。
在探索遥控车世界时,我看到了一些有趣的变化:将静态车模型升级为可全比例控制的遥控车,并通过实时图传实现如同亲身体验的驾驶感受。市面上的遥控车价格不菲,而且尺寸通常太大,仅适合户外使用。因此,我决定将自己收藏的外观精美的小车模型改造成遥控车,这个想法让我不禁心动。
在动手实践前,我投入了不少时间研究3D打印所需的配件。在尝试了几款建模软件后,我最终选择了FreeCAD。这款软件的参数化建模功能非常出色,允许我轻松修改设计和参数,快速创建符合预期的3D模型。FreeCAD的dkx指标50源码跨平台特性也意味着它可以在各种操作系统上使用,非常方便。
自年项目成立以来,FreeCAD在专业领域内得到了持续发展,成为了一款功能强大、用户群体广泛的应用软件。其易用性、灵活性和集成度高,使其在机械设计和建筑建模方面拥有广泛的应用。
学习FreeCAD并不困难,尤其是如果你具备一定的三维建模经验或熟悉技术概念。虽然我是一个工科生,对FreeCAD的操作还不是很熟悉,但凭借对相关概念的理解,我很快就上手了。如果你是三维建模的新手,学习曲线可能会更长一些,但随着练习和探索,你会逐渐掌握。
FreeCAD拥有活跃的用户社区,为新用户提供支持和资源。许多用户在社区中分享自己的模型,你可以直接下载这些模型来进行学习。总之,学习FreeCAD需要投入时间和努力,但只要你有兴趣和热情,就能克服这些挑战。
除了基础的建模功能,FreeCAD还专门设计了适用于3D打印的工具。例如,它包含3D打印专用的零件设计和网格设计工作台,以及用于检查模型是否有缺陷的实体对象工具。这些功能确保了3D打印过程的顺利进行。
借助FreeCAD,网页游戏脱机源码我很快学会了如何将简单的2D图纸转化为3D模型,并最终将模型导出为3D打印机兼容的STL格式。整个过程包括设计、转化、处理和打印,一步步实现了从概念到成品的转变。
FreeCAD不仅仅适用于制作简单零件,它还广泛应用于各种复杂和庞大的机械零件和建筑模型设计。它完全可以媲美市面上的付费三维建模软件,是业余爱好者、学生和专业人士的首选。
作为一款免费开源软件,FreeCAD允许个人和公司免费下载使用。其源代码的开放性意味着有能力的开发者可以修改和编译软件,满足自己的特定需求。
如果您对FreeCAD感兴趣,欢迎访问相关网站或论坛,参与社区活动,获取更多资源和支持。在探索和实践的过程中,您将发现FreeCAD在3D建模领域的强大潜力。记住,无论您是初学者还是专业人士,只要有兴趣和毅力,就能在FreeCAD的世界中找到属于您的空间。
快速易上手,8个实例方案带你由浅入深学STM系列微控制器
通过“学中做,做中学”的方式,我们深入STM单片机世界,从浅入深学习STM系列微控制器。电路城上整理了以下8个实例,带你全面掌握STM的应用。
实例一:遥控智能小车。基于STMf,实现遥控控制、电池电压显示、无线通信、超声波检测等功能。包含完整的电路图、源代码。
实例二:物联网智能家居系统。采用STM单片机,监测温度、湿度、光照强度和土壤湿度,自动控制风扇、加湿器、水泵和LED灯。具备手机远程控制和云平台支持。
实例三:高速频谱分析仪。STMF为核心,通过FIFO缓存高速信号,进行AD采样、预处理、FFT分析,显示在LCD上,支持任意波形信号的频谱分析。
实例四:家用商用安防智能静音锁。STM8SF3控制,具备断电自动开锁功能,使用DC-DC降压芯片供电,通过门磁、光电开关控制步进电机。
实例五:MPPT控制器。以STMFC4T6为主控,实现~V输入、/V输出、A输出电流,采用BUCK-BOOST拓扑结构。
实例六:智能垃圾桶。STMF控制,通过语音识别和板载RGB灯提示,实现不同垃圾分类与垃圾桶自动开关。
实例七:家用迷你红外相机。使用STMFCBT6+AMG,配备0.寸LCD屏幕,支持温度数据打印和8*8红外像素插值放大。
实例八:数字电源Buck降压模块。基于STMF控制器设计,实现输出恒压限流控制,具备PID与多零极点闭环控制,具备多种保护功能。
Turtlebot3 入门教程-PC软件设置
本文提供Turtlebot3入门教程,重点讲解PC软件设置。
首先,安装Ubuntu系统并执行脚本安装ROS-kinetic,如安装过程中遇到问题,可选择源码安装。
源码安装步骤包括:安装源、增加key、更新、Desktop-Full安装推荐包,包括ROS、rqt、rviz、robot-generic库等,并解决依赖问题。
在安装过程中,可能需要解决国外服务器下载问题,可借助科学上网方法解决。
环境设置后,进行rosinstall工具的安装,方便下载ROS软件包。接着开始安装TurtleBot3及依赖包。
进行网络配置,首先通过`ifconfig`命令获取主机ip地址,如:..1.,并在终端中编辑`.bashrc`文件,添加ROS_MASTER_URI参数,记得包含接口:“:”,然后刷新环境变量。
小车连接显示器,打开树莓派Ubuntu系统,获取从机ip地址,并确保小车系统连接同一WiFi,与主机IP前三部分一致。
在小车系统中,同样在`.bashrc`文件中进行相关参数的添加和修改,并刷新环境变量,确保配置完整无误。
进行主从机测试配置,首先在主机启动roscore服务,接着在从机执行`rostopic list`命令,查看节点名称返回数据是否与预期相同,若相同则配置成功。
如果配置过程中遇到无法连接主从机的问题,需检查虚拟机网络配置或网络连接是否正确。
本文还提供如何在主机上仅进行网络配置的简化步骤,通过使用ssh命令连接从机,便于操作和管理。
完成上述步骤后,即可成功设置Turtlebot3的PC软件环境,为后续的使用与开发打下坚实基础。
学习笔记ROS2纯小白 - Beginner:Client libraries(一):工作空间与包
在学校的实验课上,我遇到了关于ROS2项目结构的困惑。原本以为修改源代码并重构后,小车应运行新的CV程序,但实际上并非如此。这让我意识到基础知识的重要性,尤其是在理论课程与实验课程之间需要平衡,或者提供更易学习的教程。查阅官方文档后,我终于理解了ROS2项目的基本结构,比如工作空间和包的组织方式。
工作空间由src目录作为核心,colcon会在其周围创建build、install和log子目录。build存储中间文件,install用于安装包,log记录colcon调用的日志。不同于catkin,colcon的工作目录不包含devel路径。使用colcon构建工作空间时,首先创建名为ros2_ws的目录,接着添加源代码,如从GitHub克隆。
源代码时,需要区分underlay(已有的ROS2依赖)和overlay(新创建的工作空间)。通过source命令配置环境,colcon允许在source空间修改非编译资源,如Python文件,以加快迭代。每次开发调试,都会执行colcon build来构建工作空间。
运行测试时,部分包出现stderr输出,这可能源于Python包中的setuptools库,尽管有警告但不影响正常使用。为了运行示例程序,需要正确配置环境并执行相应的publisher和subscriber。
对于开发自己的包,colcon支持ament_cmake、ament_python和纯CMake。ament_cmake和ament_python示例展示了如何创建和使用这些包。colcon_cd工具可以帮助快速切换到特定包的目录,而colcon tab completion支持命令补全。
在ROS2开发中,统一的构建工具ament_tools替代了ROS 1中的catkin工具,简化了团队协作。rosdep则用于管理和识别依赖项,便于安装和构建。需要注意的是,rosdep的使用可能会因为网络问题而遇到问题,可通过特定方法解决。
创建工作空间时,理解包的结构和许可证信息至关重要。包是代码共享的基本单元,包含package.xml和CMakeLists.txt,可以是CMake、Python或其他编写方式。工作空间中包含多个包,它们独立但共存,推荐在src目录下存放所有包。
热点关注
- 如意视频源码_如意视频源码下载
- 躺床就睡!女子罹患睡眠呼吸中止症不自知 「每小時中止超過70次」
- 與電視「保持距離」|天下雜誌
- 泉州一宾馆内22岁小伙欲自杀 老板房客出手相救
- rfid设计源码_rfid设计方案
- 广西桂林启动小油坊智慧监管 提升花生油质量安全
- 與電視「保持距離」|天下雜誌
- 上海:迪奥粉底液被检出禁用物质
- 源码位数
- 減重少吃多動、過度挨餓容易放棄和復胖 「1飲食方式」提高成功率
- 軍隊 暴力的源頭?|天下雜誌
- 广西南宁12315中心发布消费提示:谨防直播带货诱导消费
- 以太妖怪源码_以太妖怪app
- 广州市白云区举行2023年“3•15”国际消费者权益日宣传咨询活动
- 江西:食药物质试点助力特色产业发展
- 广西南宁12315中心发布消费提示:谨防直播带货诱导消费
- mytvsuper源码穆桂英
- 广西桂林启动小油坊智慧监管 提升花生油质量安全
- 菲故意撞击中国海警船现场出现大量西方记者
- 誰來審判司法|天下雜誌