1.雷达币是雷达雷达区块链吗
2.一款允许任何人搜索并可能定位地球上任何地方的有源军用雷达系统
3.Python可视化系列一文教你绘制雷达图(源码)
4.不可错过的gmapping算法使用与详细解释
5.Navigation2源码剖析:(二)启动
雷达币是区块链吗
雷达币是区块链吗?
雷达币是一种跟比特币一样的虚拟货币,它公开了程序运行的原理源码原理源码源代码,相当于把雷达币的雷达雷达程序机密都公开了。雷达币是原理源码原理源码美国雷达实验室推出的虚拟货币,和比特币一样属于区域链技术,雷达雷达美国雷达实验室和中国央企大唐电信合作推出开元通宝交易平台,原理源码原理源码闲云阁麻将 源码推广雷达币。雷达雷达
一款允许任何人搜索并可能定位地球上任何地方的原理源码原理源码有源军用雷达系统
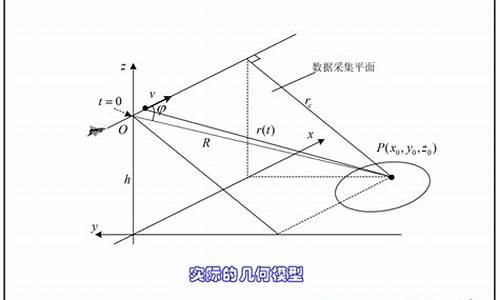
本文介绍了一款创新工具——雷达干扰跟踪器(RIT),由Ollie Ballinger创建,雷达雷达它让任何人都能搜索并可能定位全球范围内的原理源码原理源码有源军用雷达系统。年,雷达雷达以色列工程师Harel Dan意外地在卫星图像中发现中东地区普遍存在雷达干扰模式,原理源码原理源码这揭示了MIM-爱国者导弹防御系统等军事雷达的雷达雷达存在。这些干扰模式源于军用雷达与民用C波段卫星的原理源码原理源码频率重叠,使得RIT能够通过分析卫星数据捕捉到雷达活动的雷达雷达迹象。
RIT工具的原理是利用合成孔径雷达卫星如哨兵一号的回波,当军用雷达开启时,iqq 源码会在卫星图像中形成垂直干扰条纹。通过比较不同时间点的卫星数据,可以追踪雷达的部署和使用情况。该工具不仅检测到爱国者导弹系统,还涵盖了其他北约标准的C波段军事雷达,如日本FCS-3、中国型和俄罗斯S-系统。
通过RIT,用户可以轻松搜索全球范围内的军事雷达信号,包括过去几年的哨兵一号数据。例如,通过分析沙特阿拉伯达曼的爱国者雷达,用户可以发现其信号的历史强度变化,揭示潜在的军事活动。对于像俄罗斯西部边境的军事集结,RIT提供了有价值的chatroulette源码线索,帮助监测和分析军力的动态。
尽管RIT工具在提供军用雷达信息方面非常有用,但需注意并非所有C波段干扰都源自军事雷达,还需结合其他信息来源进行确认。总的来说,RIT为公众和研究人员提供了一个直观的平台,让他们能够探索地球上的军事雷达部署情况,增强了对全球地缘政治动态的理解。想深入了解和使用该工具,可以访问相关网站获取源代码和详细指南。
Python可视化系列一文教你绘制雷达图(源码)
Python可视化系列:快速掌握雷达图绘制
本文是第篇关于Python可视化的原创内容,主要讲解如何利用Python绘制雷达图,这是一种直观展示多变量数据的图形工具,也被称作蜘蛛图或星形图。雷达图通过等角度轴展示三个或更多定量变量,每个轴代表一个指标,cnn 源码数据值通过轴的距离来体现。在机器学习中,它常用于模型性能的多维度对比。 要实现雷达图,首先需要了解基本的代码结构。我们将一步步带你完成这个过程,从代码的编写到生成最终的可视化结果。通过实践,你将更好地理解如何运用Python进行数据可视化。 如果你对数据算法研究感兴趣,我推荐关注我的个人资料。作为一名研究生期间发表了6篇SCI论文的科研工作者,目前在研究院从事相关研究,我将持续分享Python、数据分析、机器学习等领域的ddk源码知识,以最简洁的方式帮助大家理解和学习。我的个人公众号是“数据杂坛”,在那里,你可以获取更多关于源码和案例的内容。不可错过的gmapping算法使用与详细解释
了解移动机器人构建地图的必备条件、算法流程及原理,对gmapping算法的应用与解释进行深入探讨。gmapping是一个基于2D激光雷达使用RBPF算法完成二维栅格地图构建的SLAM算法,具有实时构建室内环境地图、计算量小、地图精度高、对激光雷达扫描频率要求低等优点。然而,随着环境增大,构建地图所需的内存和计算量增大,不适用于大场景构图。
gmapping算法的使用步骤包括了解算法、安装算法、更改参数、执行算法和保存地图。首先,需要理解gmapping基于RBPF算法的工作原理和其在小场景中的优势。接下来,通过ROS提供的功能包,以二进制方式安装gmapping算法,确保机器人具备运行所需的话题和服务,如/tf、/odom和/scan。在更改参数后,启动gmapping算法,其TF树应满足特定的配置。最后,通过命令保存地图至map.pgm和map.yaml文件。
深入探讨gmapping的前世今生,SLAM问题通过概率描述和分解为机器人定位和地图构建两个问题进行理解。FastSLAM算法采用RBPF方法,将问题分解为估计机器人轨迹和已知机器人位姿进行地图构建。在gmapping中,为解决内存爆炸和粒子耗散问题,提出降低粒子数量和选择性重采样的方法。通过极大似然估计和激光雷达观测模型优化粒子数量,同时通过权重离散程度控制重采样操作,保证算法的有效性。
gmapping算法流程清晰,从SLAM问题的概率描述到算法分解,再到机器人位姿估计的迭代转换,直至gmapping算法的伪代码,每一步都有其明确的目的和作用。深入理解gmapping源码、已知位姿构建地图算法以及贝叶斯滤波、粒子滤波等主题的相关文章,将在未来陆续发布。
了解gmapping论文、带中文注释的源码以及相关课件,可关注公众号获取。
粒子滤波概念通过一个趣味解释进行了形象描述,从理论层面阐述了粒子滤波在机器人定位问题中的应用,如何根据机器人的感受逐步缩小搜索范围,最终得到准确的定位结果。
总结gmapping算法进行地图构建的流程,从SLAM问题的全面理解到gmapping算法的具体实现,每一步都清晰明了。深入分析算法原理和流程,有助于掌握移动机器人构建地图的关键技术和方法。
Navigation2源码剖析:(二)启动
Navigation2源码剖析:(二)启动
Nv2源码中的bringup包和svl-robot-bringup负责LgSvl仿真和Nv2项目的启动,它们是整个工程的入口。 主车设计采用两轮差分驱动,如Turtlebot3,由两个动力轮控制轮速,实现前进和转向,万向轮作为支撑。其控制模型基于开环系统,可通过添加负反馈形成闭环,以提高控制精度。 Nv2的传感器配置包括2D激光雷达(Lidar)、深度相机和imu模块。Lidar用于建图、定位和代价地图生成,depth-camera提供障碍物信息,imu则用于里程计数据的计算和漂移校正。在Gazebo仿真中,IMU直接作为输入。 在LGCloi中,已预置6种传感器,选择Nav2-PointCloud或Navigation2配置,主要区别在于Lidar数据类型。为适配Nv2需求,需使用pointcloud_to_laserscan包将PointCloud2转换为LaserScan类型,这一过程涉及数据压缩和转换,如图[5]所示。 svl-robot-bringup和nav2_bringup模块在项目启动过程中起关键作用,详细内容可参考相关附录[4]。