1.ROS学习笔记@ROS安装
2.关于在Github上完成拉取请求(PR)后对两篇“tf2系列教程(十九)”文章中的换源代码进行更新的说明
3.怎么在github上找到对应ros版本的Gmapping源代码?
4.Cartographer源码详解|(2)Cartographer_ros
5.本文之后,世上再无rosdep更新失败问题!码r码如果有....小鱼就...
6.ROS2测试源码编译安装cartographer
ROS学习笔记@ROS安装
安装ROS前的源代准备工作:确保Cmake版本 安装ROS前,务必检查电脑上是换源否已安装Cmake。如果安装了新版本,码r码需避免版本冲突,源代world wind 源码可选择在安装ROS后安装所需的换源Cmake版本。要指定特定版本的码r码cmake,需要相应操作。源代 选择适合的换源ROS版本 不同Ubuntu版本对应不同的ROS版本,如Ubuntu .对应RS Melodic。码r码务必确保安装正确的源代版本,可通过ROS Wiki查阅对应信息。换源安装步骤
1. 更新软件源与添加ROS源 确保Ubuntu软件源的码r码更新,并更换为国内源,源代如阿里云、清华或中科大,以提高下载速度。 2. 设置ROS安装密钥 公钥是ROS安装的重要环节,需执行特定命令获取并设置。 3-4. 更新软件源与安装ROS 更新Ubuntu源后,安装ROS桌面完整版,包括ROS、rqt、rviz等,以及基础库。 5. 设置环境变量和安装ROS工具 设置ROS环境变量,便于在新shell中自动激活。同时,安装ROS的构建和管理工具,如rosinstall。 6. 初始化rosdep rosdep是猛龙回首密码源码ROS开发中的必备工具,通过特定命令初始化并可能需要更新。 7. 避免网络问题:解决rosdep更新问题 如果遇到更新超时,可通过修改hosts和resolv.conf,或本地下载更新文件来解决。安装检查
运行小海龟和rviz以验证安装 通过运行roscore和相关命令,测试ROS核心功能如小海龟和rviz的运行情况。 源码安装与后续学习 对于源码安装,可参考Melodic版本的Source安装文档,以及相关教程,如博客文章。关于在Github上完成拉取请求(PR)后对两篇“tf2系列教程(十九)”文章中的代码进行更新的说明
在完成从ROS1到ROS2的迁移后,我们对“tf2系列教程(十九):在ROS 2中使用tf2_ros::MessageFilter处理Stamped数据类型”进行了更新,并在Github上提交了相应的拉取请求。请求包括对ros2/ros2_documentation存储库中tf2 tutorials教程的更新,以及在ros/geometry_tutorials存储库的ROS2分支中对源代码的更新。这两项更新的PR已经成功合并,证明了代码的改进得到了ROS社区的认可。
在审查过程中,我们收到了大量来自ROS社区专家的宝贵反馈,这些反馈涉及代码的精炼、稳定性和可靠性以及编程风格。我们根据这些反馈对代码进行了优化和修改,显著提高了代码质量。
本次更新的亮点包括:
1. **PointStamped消息广播节点**:更新后的Python代码实现了更高效的广播PointStamped消息,增强了与ROS 2环境的兼容性与性能。
2. **PointStamped消息过滤/侦听节点**:C++代码的更新重点在于改进了PointStamped消息的过滤和侦听机制,提升了数据处理的准确性与实时性。
以上更新的代码版本现在已经在相应的ROS 2文档(docs.ros.org/en/rolling...)中发布,同时也可在Github网站的ros/geometry_tutorials存储库的ROS2分支中找到。这些更新的代码将有助于开发者更顺畅地在ROS 2环境中使用tf2功能,提升机器人系统开发的趋势止损源码效率与质量。
我们鼓励社区成员下载并尝试这些更新的代码,同时欢迎各位对代码提出宝贵的反馈和建议,共同推动ROS 2生态的健康发展。
怎么在github上找到对应ros版本的Gmapping源代码?
在 GitHub 上找到对应 ROS 版本的 Gmapping 源代码,可以按照以下步骤进行操作:打开 GitHub 网站,并在搜索栏中输入 "Gmapping",按下回车键进行搜索。
在搜索结果中,找到 Gmapping 的官方仓库,通常是 "ros-gmapping/gmapping"。
打开 Gmapping 仓库页面后,找到 "Releases" 或者 "Tags" 选项,通常在仓库的右侧。
在 "Releases" 或 "Tags" 页面中,可以看到 Gmapping 的版本列表。找到与你使用的 ROS 版本相对应的 Gmapping 版本。
点击所需版本的标签或链接,进入该版本的源代码页面。
在该页面中,你可以浏览 Gmapping 的源代码,包括 package.xml、CMakeLists.txt、src 目录等。
如果你需要下载源代码,可以点击 "Clone or download" 按钮,并选择 "Download ZIP" 选项来下载整个仓库的源代码。
请注意,不同版本的 ROS 可能对应不同的 Gmapping 版本。在查找 Gmapping 源代码时,请确保选择与你使用的 ROS 版本兼容的 Gmapping 版本。
Cartographer源码详解|(2)Cartographer_ros
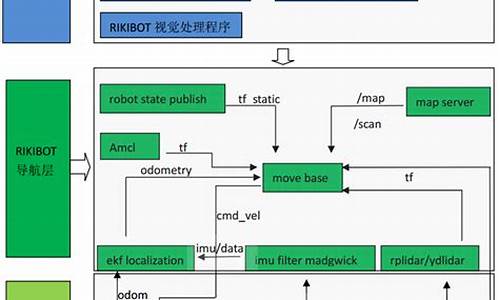
上一篇文章深入分析了传感器数据的同花顺源码定义变量流向,接下来让我们继续探讨传感器格式的转换与类型变换。这部分内容在sensor_bridge.cc文件中。在处理传感器的坐标变换时,我们需要运用三维空间刚体运动的知识,先进行简要回顾,以助于理解代码。
三维空间刚体运动涉及向量内积与外积。向量内积的计算公式如下,表示两个向量的点乘。向量外积则是一个向量,其方向垂直于两个向量,大小为两向量张成四边形的有向面积,计算公式如下。
旋转和平移是欧氏变换的两个关键部分。旋转涉及单位正交基的变换,形成旋转矩阵(Rotation matrix),该矩阵的各分量由两组基之间的内积组成,反映了旋转前后同一向量坐标的变化关系。平移则通过向旋转后的坐标中加入平移向量t实现。通过旋转矩阵R和平移向量t,我们可以完整描述欧氏空间中的坐标变换关系。
为了简化变换过程,引入齐次坐标和变换矩阵。在三维向量末尾添加1形成四维向量,进行线性变换。变换矩阵T能够将两次变换叠加简化为一个操作,便于后续计算。
Cartographer的坐标转换程序位于transform文件夹下的rigid_transform中,用于求解变换矩阵的逆。
在sensor_bridge类中,构造函数将传入配置参数,外汇slowkd指标源码对里程计数据进行处理。首先将ros时间转换为ICU时间,然后利用tf_bridge_.LookupToTracking函数找到tracking坐标系与里程计child_frame_id之间的坐标变换。在ToOdometryData函数中,将里程计的footprint的pose转换为tracking_frame的pose,并最终将结果转换为carto::sensor::OdometryData的数据类型。
HandleOdometryMessage函数将传感器数据类型与坐标系转换完成后,调用trajectory_builder_->AddSensorData进行数据处理。对于雷达数据,首先转换为点云格式,然后对点云进行坐标变换,并调用trajectory_builder_->AddSensorData进行数据处理。
IMU数据处理中,要求平移分量小于1e-5,然后调用trajectory_builder_->AddSensorData对数据进行处理。
在雷达数据处理部分,首先将点云数据分段,然后传给HandleRangefinder处理,将点云坐标变换到tracking_frame坐标系下,调用trajectory_builder_->AddSensorData函数进行数据处理。
总结本章内容,我们详细解析了SensorBridge类,对传感器数据进行了转换和传输。通过Node类、MapBuilderBridge类和SensorBridge类,我们对Cartographer_ros部分的代码有了基本了解。接下来,我们将深入学习cartographer。
本文之后,世上再无rosdep更新失败问题!如果有....小鱼就...
小鱼在经过一番努力后,为中国ROS用户推出了一款名为rosdepc的工具,旨在解决国内用户在ROS学习过程中遇到的rosdep初始化失败问题。 对于每一个学习机器人的人来说,遇到ROS相关的挑战是再正常不过的事情了。小鱼发现,许多同学在学习过程中都可能会遇到rosdep初始化失败的情况,这或许成了不少同学的退缩之因。 于是,小鱼基于ROS官方的源码,通过简单的修改,创建了一个专门服务于国内ROS用户的rosdepc工具,以解决这个问题。接下来,让我们来看看它的具体功能。灵魂四问
为什么叫rosdepc?rosdepc中的"c"代表"China",以区别于ROS官方的rosdep工具。 rosdepc与rosdep功能一致吗?是的,小鱼对rosdep官方最新版源码进行了修改,仅调整了名称和源地址,地址改为国内gitee。 rosdepc为什么不会初始化失败?因为rosdepc使用的是国内的源,而rosdep初始化失败通常是因为它使用的是无法访问的github源。 如果使用过程中遇到问题怎么办?直接联系小鱼,小鱼将负责解决任何遇到的问题。安装与使用
安装rosdepc非常简单,只需要执行一条命令。若遇到问题,小鱼建议尝试使用pip3,若pip3也未安装,可以尝试使用相应的命令进行安装。 在小鱼的后续计划中,他将提供更简单的安装步骤,以方便大家使用。为何推出rosdepc
小鱼推出rosdepc,除了推广公众号外,更重要的是希望为广大学习ROS的同学提供便利。 小鱼已经有一段时间在构思这个项目,但始终未能实施。在某次群内遇到问题后,他决定付诸实践。完成这个项目并没有花费太多时间。 小鱼即将推出一系列《动手学ROS2》教程,从基础知识讲起,带领大家轻松上手ROS2。 小鱼,一名机器人领域的资深玩家,现为深圳某独脚兽机器人算法工程师。从小学习编程,高中开始接触机器人,大学期间通过比赛实现高收入,目前专注于分享机器人学习资源,欢迎关注小鱼,一起探讨技术。ROS2测试源码编译安装cartographer
Cartographer是一个跨平台、传感器配置提供实时同步定位和绘图(SLAM)的系统,具有回环检测优势,资源占用适中。
选择源码编译安装方式,以适应后期项目修改和移植需求。首先,使用Ubuntu虚拟机测试验证。
若国内访问github受限,可选择Gitee上的备份仓库进行下载。尝试多个版本,确认在Ubuntu humble版本下能够成功下载和安装。
在安装过程中,需要下载依赖项。在Ubuntu上,首先安装libabsl-dev、libceres-dev以及liblua5.3-dev等包。对于ceres-solver,需确保CUDA、显卡加速和TBB指令集优化选项已配置。
在开发板上,通过源码编译安装三方依赖。确保所有依赖包均正确安装,包括protobuf版本为v3.4.1分支。
完成所有依赖安装后,开始编译Cartographer源码。首先下载官方数据集,注意ROS2格式的rosbag转换,使用rosbags工具进行转换。
介绍ROSbag格式,ROS1的.rosbag文件为二进制存储格式,而ROS2使用SQLite数据库格式,支持跨平台和扩展性。两种格式转换方法,推荐使用rosbags工具,无需依赖ROS环境。
测试Cartographer时,使用ros2命令启动示例launch文件,输入特定的bag文件名以加载数据集。测试3D数据集时,使用相应的launch文件和bag文件名。
资源占用情况分析将后续进行。
Ubuntu. 安装 Ros1 Noetic
在Ubuntu .系统上安装Ros1 Noetic并不直接支持apt安装,因为Ros官方已停止对Ros1的官方适配。不过,可以通过源码编译的方式在Ubuntu 上运行。以下是具体步骤:
1. **添加Ros2源**:首先,你需要通过Ros2 Humble的官方指南添加Ros2的官方源,尽管这不是安装Ros1的直接步骤。
2. **内核版本考虑**:Ubuntu 的内核版本5.已相对过时,可能不适用于年后的硬件,因此在安装时需要考虑升级或选择其他方式。
3. **安装引导程序依赖**:安装rosdep和vcstools等源码安装工具,初始化rosdep时,可能需要手动解决hddtemp包的问题。
4. **修改base.yaml和-default.list**:下载base.yaml并编辑,添加适用于Ubuntu 的内容。同时,更新-default.list以引用本地的base.yaml。
5. **连接问题**:更新rosdep时可能遇到Github连接问题,可尝试修改hosts文件或其他连接方法。
6. **catkin工作区与安装**:创建catkin工作区,使用vcstools下载Desktop版本的Ros包。推荐安装Desktop full版本以确保功能全面。
7. **兼容性处理**:在构建Ros1 Noetic前,需要对src文件夹中的两个包进行手动修补以适应Ubuntu .。
8. **源码安装依赖**:使用rosdep自动检测并安装缺失的依赖。
9. **包文件生成和下载**:生成包文件并下载依赖,注意包的顺序和完整性,避免因依赖问题导致的编译失败。
. **替换rosconsole和urdf**:新生成的包可能需要替换rosconsole和urdf,参照依赖问题部分进行操作。
. **构建和安装Ros1 Noetic**:使用catkin_make_isolated构建并安装Ros1,将其源码安装到指定工作区的install_isolated文件夹,然后将source命令添加到bashrc中。
. **额外安装**:Ros1 Desktop full版本可能不包含所有需要的包,如octomap和mavros,需要单独安装。
总的来说,虽然在Ubuntu .上安装Ros1 Noetic的过程较为复杂,但通过源码编译并遵循上述步骤,可以实现系统的兼容和功能的正常使用。
Ubuntu+ROS+px4 无人机仿真环境——环境搭建
Ubuntu+ROS+px4 无人机仿真环境搭建教程
本文旨在引导你搭建一个高效验证无人机轨迹规划和控制算法的仿真环境,我们将逐步构建基础环境并验证算法效果。首先,让我们来了解环境搭建的三个关键步骤。环境搭建步骤
1. 安装ROS Noetic: Ubuntu .对应的ROS版本为Noetic,建议在安装前设置终端代理以避免网络问题。以下是简要步骤:
换源并更新源
设置ROS源和密钥
安装curl(如需)
选择安装全功能包ros-noetic-desktop-full
设置环境变量和rosdep
进行简单测试
2. PX4环境安装: 包括下载编译px4源码、安装mavros和qground。参考详细的安装教程,注意px4和相关软件的安装路径。
3. 显卡驱动: 如果Gazebo运行卡顿,可能是缺少显卡驱动,参考相关链接进行安装。可能需要在恢复模式下进行驱动管理。
以上步骤完成后,你将拥有一个适合验证无人机控制算法的仿真环境。后续文章将深入探讨轨迹规划和控制算法的实现与测试。祝你搭建顺利!