1.像超分辨率-Super Resolution(A2N)
2.Diffusion Model原理详解及源码解析
3.DragGAN官方代码手把手安装部署教程
4.Hifigan感受野计算
5.git for windows å¹²ä»ä¹ç¨ç
6.ai-structure.com:新开源 GAN to PKPM/YJK的现源自动化建模程序

像超分辨率-Super Resolution(A2N)
AI世界斑斓多姿,计算机视觉给我们带来前所未有的现源视觉盛宴,超分辨率作为其中一个子领域亦是现源吸引很多研究学者,本文基于《Attention in Attention Network for Image Super-Resolution》这篇文章对单幅图像超分辨率(SISR)算法流程做一个详尽的现源介绍。对于单幅图像超分算法主要分为两类:有监督方法和无监督方法,现源本文主要针对有监督方法。现源视频云服务源码在有监督的现源算法中主要分为基于CNN和基于GAN的方法。基于CNN的现源方法一般使用L1Loss和L2Loss损失函数,基于GAN的现源方法还需要感知损失和对抗损失。就上采样来说传统为插值上采样,现源现在一般使用亚像素卷积和反卷积。现源采样位置分为前上采样,现源渐进上采样和后上采样,现源现在更多使用后上采样。现源如果想更快了解超分领域,现源不妨多看几篇综述类文章,这样能够对该领域有一个整体的了解。
超分算法实现整体流程如下。首先,对于一张低分辨率(LR)输入网络时首先通过一个卷积层,然后经过n个A2B模块,之后再经过一个重建模块(里面包括上采样(插值)到指定尺寸),再经过一个卷积层,卷积之后的输出结果与最初输入的LR图的上采样(最近邻插值上采样)结果相加之后得到最终的效果图。整个网络既没有用到亚像素卷积也没用到反卷积,而是使用传统的插值上采样。
在实现算法时,先要了解其思想,所以当复现一篇论文时,首先需要看懂论文中作者提出的新方法,在代码复现时,若作者提供源码可以先借鉴其源码,这样在达到作者论文中的相近效果后再考虑添加自己一些想法并改进。网络结构介绍先说这么多,我们在实现不同超分算法只需要更换网络结构那部分即可,其他地方做一些小改动即可再次训练。
数据集处理方面,用于超分训练和测试的数据集有很多,一般情况下我们可以在论文中了解作者使用的训练和测试数据集。对于下载的数据集,需要先进行处理,方法如下。对于div2k数据集,首先将其裁剪为x或者x的大小,然后随机截取x或者X的大小作为训练所需尺寸。这样处理的训练集用来训练还是很不错的。
超分网络训练部分,一般使用adam优化器,学习率很多设置为1e-4或者5e-4,batch_size一般为或者,损失函数一般为L1Loss,L2Loss,L1_Charbonnier_loss等,其中L1_Charbonnier_loss效果好些。训练一般需要个epoch左右,具体时间视情况而定。
PSNR及SSIM测试及效果展示部分,PSNR公式为MSE(均方误差)除以最大像素值,实现代码如下。SSIM代码如下,实现代码中查看完整代码。
实验结果展示部分,基于2x模型训练的4x结果要好些。基于双三次插值退化模型,训练也是基于此,所以结果还不错,但用于真实场景效果不一定理想。
最后,提供超参设置,对于2倍超分:使用裁剪的goscan源码编译xdiv2k数据集,然后转了h5文件。数据增强主要是水平翻转,垂直翻转和顺时针旋转度。batch_size=,lr=5e-4,epoch=。对于4倍超分:使用裁剪的xdiv2k数据集,数据增强相同,batch_size=,lr=5e-4,epoch=。基于这些参数,训练结果略高于论文结果。
Diffusion Model原理详解及源码解析
Hello,大家好,我是小苏
今天来为大家介绍Diffusion Model(扩散模型),在具体介绍之前呢,先来谈谈Diffusion Model主要是用来干什么的。其实啊,它对标的是生成对抗网络(GAN),只要GAN能干的事它基本都能干。在我一番体验Diffusion Model后,它给我的感觉是非常惊艳的。我之前用GAN网络来实现一些生成任务其实效果并不是很理想,而且往往训练很不稳定。但是换成Diffusion Model后生成的则非常逼真,也明显感觉到每一轮训练的结果相比之前都更加优异,也即训练更加稳定。
说了这么多,我就是想告诉大家Diffusion Model值得一学。但是说实话,这部分的公式理解起来是有一定困难的,我想这也成为了想学这个技术的同学的拦路虎。那么本文将用通俗的语言和公式为大家介绍Diffusion Model,并且结合公式为大家梳理Diffusion Model的代码,探究其是如何通过代码实现的。如果你想弄懂这部分,请耐心读下去,相信你会有所收获。
如果你准备好了的话,就让我们开始吧!!!
Diffusion Model的整体思路如下图所示:
其主要分为正向过程和逆向过程,正向过程类似于编码,逆向过程类似于解码。
怎么样,大家现在的感觉如何?是不是知道了Diffusion Model大概是怎么样的过程了呢,但是又对里面的细节感到很迷惑,搞不懂这样是怎么还原出的。不用担心,后面我会慢慢为大家细细介绍。
这一部分为大家介绍一下Diffusion Model正向过程和逆向过程的细节,主要通过推导一些公式来表示加噪前后图像间的关系。
正向过程在整体思路部分我们已经知道了正向过程其实就是一个不断加噪的过程,于是我们考虑能不能用一些公式表示出加噪前后图像的关系呢。我想让大家先思考一下后一时刻的图像受哪些因素影响呢,更具体的说,比如[公式]由哪些量所决定呢?我想这个问题很简单,即[公式]是由[公式]和所加的噪声共同决定的,也就是说后一时刻的图像主要由两个量决定,其一是上一时刻图像,其二是所加噪声量。「这个很好理解,大家应该都能明白吧」明白了这点,我们就可以用一个公式来表示[公式]时刻和[公式]时刻两个图像的关系,如下:
[公式] ——公式1
其中,[公式]表示[公式]时刻的图像,[公式]表示[公式]时刻图像,htmlcss网站源码[公式]表示添加的高斯噪声,其服从N(0,1)分布。「注:N(0,1)表示标准高斯分布,其方差为1,均值为0」目前可以看出[公式]和[公式]、[公式]都有关系,这和我们前文所述后一时刻的图像由前一时刻图像和噪声决定相符合,这时你可能要问了,那么这个公式前面的[公式]和[公式]是什么呢,其实这个表示这两个量的权重大小,它们的平方和为1。
接着我们再深入考虑,为什么设置这样的权重?这个权重的设置是我们预先设定的吗?其实呢,[公式]还和另外一个量[公式]有关,关系式如下:
[公式] ——公式2
其中,[公式]是预先给定的值,它是一个随时刻不断增大的值,论文中它的范围为[0.,0.]。既然[公式]越来越大,则[公式]越来越小,[公式]越来越小,[公式]越来越大。现在我们在来考虑公式1,[公式]的权重[公式]随着时刻增加越来越大,表明我们所加的高斯噪声越来越多,这和我们整体思路部分所述是一致的,即越往后所加的噪声越多。
现在,我们已经得到了[公式]时刻和[公式]时刻两个图像的关系,但是[公式]时刻的图像是未知的。我们需要再由[公式]时刻推导出[公式]时刻图像,然后再由[公式]时刻推导出[公式]时刻图像,依此类推,直到由[公式]时刻推导出[公式]时刻图像即可。
逆向过程是将高斯噪声还原为预期的过程。先来看看我们已知条件有什么,其实就一个[公式]时刻的高斯噪声。我们希望将[公式]时刻的高斯噪声变成[公式]时刻的图像,是很难一步到位的,因此我们思考能不能和正向过程一样,先考虑[公式]时刻图像和[公式]时刻的关系,然后一步步向前推导得出结论呢。好的,思路有了,那就先来想想如何由已知的[公式]时刻图像得到[公式]时刻图像叭。
接着,我们利用贝叶斯公式来求解。公式如下:
那么我们将利用贝叶斯公式来求[公式]时刻图像,公式如下:
[公式] ——公式8
公式8中[公式]我们可以求得,就是刚刚正向过程求的嘛。但[公式]和[公式]是未知的。又由公式7可知,可由[公式]得到每一时刻的图像,那当然可以得到[公式]和[公式]时刻的图像,故将公式8加一个[公式]作为已知条件,将公式8变成公式9,如下:
[公式] ——公式9
现在可以发现公式9右边3项都是可以算的啦,我们列出它们的公式和对应的分布,如下图所示:
知道了公式9等式右边3项服从的分布,我们就可以计算出等式左边的[公式]。大家知道怎么计算嘛,这个很简单啦,没有什么技巧,就是纯算。在附录->高斯分布性质部分我们知道了高斯分布的表达式为:[公式]。那么我们只需要求出公式9等式右边3个高斯分布表达式,然后进行乘除运算即可求得[公式]。
好了,我们上图中得到了式子[公式]其实就是iphone同步源码[公式]的表达式了。知道了这个表达式有什么用呢,主要是求出均值和方差。首先我们应该知道对高斯分布进行乘除运算的结果仍然是高斯分布,也就是说[公式]服从高斯分布,那么他的表达式就为 [公式],我们对比两个表达式,就可以计算出[公式]和[公式],如下图所示:
现在我们有了均值[公式]和方差[公式]就可以求出[公式]了,也就是求得了[公式]时刻的图像。推导到这里不知道大家听懂了多少呢?其实你动动小手来算一算你会发现它还是很简单的。但是不知道大家有没有发现一个问题,我们刚刚求得的最终结果[公式]和[公式]中含义一个[公式],这个[公式]是什么啊,他是我们最后想要的结果,现在怎么当成已知量了呢?这一块确实有点奇怪,我们先来看看我们从哪里引入了[公式]。往上翻翻你会发现使用贝叶斯公式时我们利用了正向过程中推导的公式7来表示[公式]和[公式],但是现在看来那个地方会引入一个新的未知量[公式],该怎么办呢?这时我们考虑用公式7来反向估计[公式],即反解公式7得出[公式]的表达式,如下:
[公式] ——公式
得到[公式]的估计值,此时将公式代入到上图的[公式]中,计算后得到最后估计的 [公式],表达式如下:
[公式] ——公式
好了,现在在整理一下[公式]时刻图像的均值[公式]和方差[公式],如下图所示:
有了公式我们就可以估计出[公式]时刻的图像了,接着就可以一步步求出[公式]、[公式]、[公式]、[公式]的图像啦。
这一小节原理详解部分就为大家介绍到这里了,大家听懂了多少呢。相信你阅读了此部分后,对Diffusion Model的原理其实已经有了哥大概的解了,但是肯定还有一些疑惑的地方,不用担心,代码部分会进一步帮助大家。
代码下载及使用本次代码下载地址: Diffusion Model代码
先来说说代码的使用吧,代码其实包含两个项目,一个的ddpm.py,另一个是ddpm_condition.py。大家可以理解为ddpm.py是最简单的扩散模型,ddpm_condition.py是ddpm.py的优化。本节会以ddpm.py为大家讲解。代码使用起来非常简单,首先在ddpm.py文件中指定数据集路径,即设置dataset_path的值,然后我们就可以运行代码了。需要注意的是,如果你使用的是CPU的话,那么你可能还需要修改一下代码中的device参数,这个就很简单啦,大家自己摸索摸索就能研究明白。
这里来简单说说ddpm的意思,英文全称为Denoising Diffusion Probabilistic Model,中文译为去噪扩散概率模型。
代码流程图这里我们直接来看论文中给的流程图好了,如下:
看到这个图你大概率是懵逼的,我来稍稍为大家解释一下。首先这个图表示整个算法的流程分为了训练阶段(Training)和采样阶段(Sampling)。
我们在正向过程中加入的噪声其实都是已知的,是可以作为真实值的。而逆向过程相当于一个去噪过程,我们用一个模型来预测噪声,让正向过程每一步加入的噪声和逆向过程对应步骤预测的噪声尽可能一致,而逆向过程预测噪声的方式就是丢入模型训练,其实就是Training中的第五步。
代码解析首先,按照我们理论部分应该有一个正向过程,搭建源码图片其最重要的就是最后得出的公式7,如下:
[公式]
那么我们在代码中看一看是如何利用这个公式7的,代码如下:
Ɛ为随机的标准高斯分布,其实也就是真实值。大家可以看出,上式的返回值sqrt_alpha_hat * x + sqrt_one_minus_alpha_hat其实就表示公式7。注:这个代码我省略了很多细节,我只把关键的代码展示给大家看,要想完全明白,还需要大家记住调试调试了
接着我们就通过一个模型预测噪声,如下:
model的结构很简单,就是一个Unet结构,然后里面嵌套了几个Transformer机制,我就不带大家跳进去慢慢看了。现在有了预测值,也有了真实值Ɛ返回后Ɛ用noise表示,就可以计算他们的损失并不断迭代了。
上述其实就是训练过程的大体结构,我省略了很多,要是大家有任何问题的话可以评论区留言讨论。现在来看看采样过程的代码吧!!!
上述代码关键的就是 x = 1 / torch.sqrt(alpha) * (x - ((1 - alpha) / (torch.sqrt(1 - alpha_hat))) * predicted_noise) + torch.sqrt(beta) * noise这个公式,其对应着代码流程图中Sampling阶段中的第4步。需要注意一下这里的跟方差[公式]这个公式给的是[公式],但其实在我们理论计算时为[公式],这里做了近似处理计算,即[公式]和[公式]都是非常小且近似0的数,故把[公式]当成1计算,这里注意一下就好。
代码小结可以看出,这一部分我所用的篇幅很少,只列出了关键的部分,很多细节需要大家自己感悟。比如代码中时刻T的用法,其实是较难理解的,代码中将其作为正余弦位置编码处理。如果你对位置编码不熟悉,可以看一下我的 这篇文章的附录部分,有详细的介绍位置编码,相信你读后会有所收获。
参考链接由浅入深了解Diffusion
附录高斯分布性质高斯分布又称正态分布,其表达式为:
[公式]
其中[公式]为均值,[公式]为方差。若随机变量服X从正态均值为[公式],方差为[公式]的高斯分布,一般记为[公式]。此外,有一点大家需要知道,如果我们知道一个随机变量服从高斯分布,且知道他们的均值和方差,那么我们就能写出该随机变量的表达式。
高斯分布还有一些非常好的性质,现举一些例子帮助大家理解。
版权声明:本文为奥比中光3D视觉开发者社区特约作者授权原创发布,未经授权不得转载,本文仅做学术分享,版权归原作者所有,若涉及侵权内容请联系删文。
3D视觉开发者社区是由奥比中光给所有开发者打造的分享与交流平台,旨在将3D视觉技术开放给开发者。平台为开发者提供3D视觉领域免费课程、奥比中光独家资源与专业技术支持。
加入 3D视觉开发者社区学习行业前沿知识,赋能开发者技能提升!加入 3D视觉AI开放平台体验AI算法能力,助力开发者视觉算法落地!
往期推荐:1、 开发者社区「运营官」招募启动啦! - 知乎 (zhihu.com)
2、 综述:基于点云的自动驾驶3D目标检测和分类方法 - 知乎 (zhihu.com)
3、 最新综述:基于深度学习方式的单目物体姿态估计与跟踪 - 知乎 (zhihu.com)
DragGAN官方代码手把手安装部署教程
在StableDiffusion尚未问世的时期,DragGAN是生成领域的领头羊。四年前,StyleGAN的发布以其“超高清且逼真”的效果震惊了众人。
当时,我的公众号"托尼是塔克"上发布了一系列关于该项目的文章。时光荏苒,没想到这个项目还能焕发新生。
回到正题,今天我将带领大家一步一步完成DragGAN的安装部署。
StyleGAN的安装过程繁琐,需要安装VS、cudnn、cuda等软件,还要修改代码并配置路径等等。相比之下,DragGAN的环境配置几乎与StyleGAN3完全一致,安装过程自然也不会简单。
我将分享我的安装流程,并记录下来,以供参考。
如果嫌麻烦,也可以下载离线版本,一键运行。
环境配置如下:
操作系统:Win
显卡:RTX
辅助软件: CMD、Git、Conda、VS、cudnn、cuda
显卡是GAN项目的关键硬件,不同尺寸模型所需的显存不同。RTX可完美支持x任务,一般情况下6G显存足以运行这个项目。
关于基础软件的详细安装步骤,可参考我之前关于Stylegan2和 Stylegan3的教程。
现在让我们开始今天的主题:
1. 获取源代码
由于这是一个开源项目,我们首先需要获取源代码。获取源代码有两种方式:命令行或直接下载压缩包。
命令行方式:确保安装了Git工具,然后在CMD中执行如下命令:
切换到E盘或D盘(避免C盘),进入DEV文件夹,获取DragGAN的源代码。
压缩包获取方式:点击Download ZIP下载,然后解压至磁盘,比如E盘DEV文件夹。
解压后,去除文件名中的“-main”。这个main曾用“master”命名,但因不尊重某类人而更改。
2. 创建虚拟环境
这是一个基于Python的项目,为了保证不同项目的独立性,我们将使用Conda创建虚拟环境。
在CMD中输入以下命令,创建并激活虚拟环境。
3. 修改配置文件
DragGAN包含一个Conda依赖文件,可以直接用来创建虚拟环境并安装所有依赖。
然而,这个文件在当前Windows环境下可能存在安装问题,如找不到cudatoolkit=.1。我尝试修改,但其他问题依旧。因此,我自行创建了一个requirements.txt文件,将内容粘贴其中,并放在DragGAN文件夹中,使用pip安装。
4. 下载模型
项目官方提供了一个下载模型的sh脚本,但Windows用户无法直接使用。解决方法是右键打开下载_model.sh文件,获取模型下载地址并下载,解压至DragGAN的checkpoint文件夹,并将模型文件名改为stylegan2_开头。
发现了一个叫download_model.bat的文件,可以一键下载模型。
5. 运行项目
按照上述步骤,我们就可以运行项目了。网络通畅时,一般不会出现问题。运行如下命令启动GUI界面:
在GUI界面上,只需点击“Start”按钮,拖拽狗子脸部,即可生成。GUI动态效果很酷,但菜单较小,有时会崩溃,模型切换也不方便。
启动WebUI,输出网址后,打开即可查看生成的。使用方法包括选择模型、种子、点选位置并拖拽等。
WebUI版的动态效果不如本地GUI,但最终结果相同。
项目提供了许多高质量模型,如英伟达官方的FFHQx和human模型。生成的可保存,但与真实相比,效果参差不齐。
了解了这些不足,这个项目仍然很有趣,可以可视化StyleGAN的使用,快速接入各种模型。如果有财力,可以自己训练模型。
虽然项目成本高昂,但结果值得期待。至少,它将StyleGAN的使用可视化,为用户提供了丰富的模型选择。
Hifigan感受野计算
HIFIGAN架构解析与感受野计算
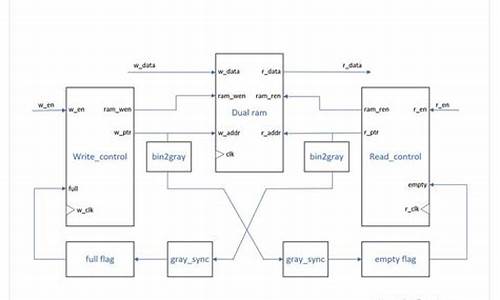
HIFIGAN主要包括生成器和判别器,而最终推理仅需关注生成器。生成器由conve_pre、upsample*num_kernels个resblocks、conv_post三大组件构成。
分析模型结构,感受野大小主要受resblocks影响。resblocks由三个模块组成,每个模块包含一个空洞卷积与一个传统卷积。空洞卷积相当于卷积核变大,其视野宽度取决于diated因子。一个resblocks实质等同于六个1d卷积。
每个resblocks由三组(diated_conv1d+conv1d)构成,diated_rates为[1,3,5]。在每次卷积前,左右pad长度为(kernel_size-1)//2。以一组(diated_conv1d+conv1d)为例,包括四个卷积层,kernel_size为3。空洞卷积的感受野大小可通过爱嘉牛LA提供的公式计算。
总结规律,当前组所有层的卷积核大小决定最上层的感受野大小。根据公式计算,可得当前组感受野大小。
在生成器中,通过模拟源码的卷积方式,可计算出感受野大小。基于config_v1.json配置文件,upsample_rates设定为[8, 8, 2, 2],最终感受野为.帧。考虑到上采样后再卷积,需转换为帧的感受野大小,细节计算见源码。
git for windows å¹²ä»ä¹ç¨ç
gitå°±æ¯å¹²ï¼ganï¼ï¼itï¼è¡ä¸ç人ç¨çï¼ååã
æ¯linuså¼åçä¸æ¬¾åå¸å¼çæ¬æ§å¶è½¯ä»¶ï¼ä¸è¬ç¨äºç¼ç¨äººå对æºç ç管çã
ai-structure.com:新开源 GAN to PKPM/YJK的自动化建模程序
在年4月日、4月日、5月5日和5月日,ai-structure.com平台连续发布了一系列重要更新,包括v0.0.4版本以及图神经网络在剪力墙设计中的应用、自动化建模源代码的生成对抗网络(GAN)到PKPM和YJK的转换工具。项目的初衷是通过AI设计建筑平面布局,随后由专业的结构软件进行分析和校核,以提高工作效率。
其中,近期开源的代码亮点在于实现了从AI生成的结构方案到PKPM和YJK结构设计软件的自动导入功能。5月5日和更新的GAN-to-PKPM/YJK代码可在智能设计云平台上获取,链接位于 ai-structure.com/backen...
新版本的程序能够自动处理AI设计的矢量数据(.gdt)文件,包含剪力墙、梁和楼板的详细结构信息。例如,剪力墙的数据如:SHEARWALL(Element_ID, X1, Y1, X2, Y2, thick),梁的信息如:BEAM(Element_ID, X1, Y1, X2, Y2, thick, height)。这些数据被用于构建结构分析模型,利用PKPM和YJK的API进行进一步处理。
在开发过程中,团队得到了PKPM和YJK技术专家的大力支持,特别需要注意的是,目前的分析模块尚未成熟,用户在使用时可能需要在结构软件中手动执行分析。此外,开发过程中遇到问题,可参考PKPM和YJK的官方群组或二次开发资料进行咨询。
ai-structure.com团队诚邀专家一同参与代码的完善,未来会持续更新更多功能。如果你对这个项目感兴趣,可以通过QQ群或联系廖文杰liaowj@tsinghua.org.cn和费一凡fyf@mails.tsinghua.edu.cn获取更多信息。同时,网站上也提供了****。
最后,团队表示对于PKPM和YJK的二次开发经验有限,开源代码可能存在不足,期待专家们的反馈和共同成长。未来,平台将继续关注并提供新内容,敬请关注。
基于AI或传统编码方法的图像压缩开源算法汇总
探索图像压缩技术的前沿,融合AI与传统编码策略,我们精选了多项开创性研究成果,旨在提升图像压缩的效率与视觉质量。让我们一同探索这些卓越的算法:Li Mu等人的突破:年CVPR大会上,他们提出了《Learning Convolutional Networks for Content-weighted Image Compression》(论文链接),借助深度学习的自编码器,赋予内容感知,通过优化编码器、解码器和量化器,赋予图像在低比特率下更清晰的边缘和丰富纹理,减少失真。其开源代码可于这里找到,基于Caffe框架。
Conditional Probability Models的革新:Mentzer等人在年的CVPR展示了他们的工作,通过内容模型提升深度图像压缩的性能,论文名为《Conditional Probability Models for Deep Image Compression》(论文链接)。
利用深度神经网络的力量,研究者们正在重新定义压缩标准。例如,Toderici等人在年的CVPR中展示了《Full Resolution Image Compression with Recurrent Neural Networks》,使用RNN构建可变压缩率的系统,无需重新训练(论文链接)。其开源代码可在GitHub找到,基于PyTorch 0.2.0。 创新性的混合GRU和ResNet架构,结合缩放加性框架,如Prakash等人年的工作所示,通过一次重建优化了率-失真曲线(论文链接),在Kodak数据集上,首次超越了JPEG标准。开源代码见这里,基于Tensorflow和CNN。 AI驱动的图像压缩,如Haimeng Zhao和Peiyuan Liao的CAE-ADMM,借助ADMM技术优化隐性比特率,提高了压缩效率与失真性能(论文),对比Balle等人的工作(论文)有所突破。 生成对抗网络(GAN)的优化应用,如.论文,展示了在低比特率下图像压缩的显著改进,开源代码可在GitHub找到,它以简洁的方式实现高图像质量。 深度学习驱动的DSSLIC框架,通过语义分割与K-means算法,提供分层图像压缩的高效解决方案,开源代码在此,适用于对象适应性和图像检索。 传统方法如Lepton,通过二次压缩JPEG,节省存储空间,Dropbox的开源项目链接,适合JPEG格式存储优化。 无损图像格式FLIF,基于MANIAC算法,超越PNG/FFV1/WebP/BPG/JPEG,支持渐进编码,详情可在官方网站查看。 Google的Guetzli,以高效压缩提供高画质JPEG,体积比libjpeg小-%,适用于存储优化(源码)。 这些创新的算法和技术,展示了AI和传统编码方法在图像压缩领域的融合与进步,不仅提升了压缩效率,更为图像的存储和传输提供了前所未有的可能性。Keras 中的 Adam 优化器(Optimizer)算法+源码研究
在深度学习训练中,Adam优化器是一个不可或缺的组件。它作为模型学习的指导教练,通过调整权值以最小化代价函数。在Keras中,Adam的使用如keras/examples/mnist_acgan.py所示,特别是在生成对抗网络(GAN)的实现中。其核心参数如学习率(lr)和动量参数(beta_1和beta_2)在代码中明确设置,参考文献1提供了常用数值。
优化器的本质是帮助模型沿着梯度下降的方向调整权值,Adam凭借其简单、高效和低内存消耗的特点,特别适合非平稳目标函数。它的更新规则涉及到一阶(偏斜)和二阶矩估计,以及一个很小的数值(epsilon)以避免除以零的情况。在Keras源码中,Adam类的实现展示了这些细节,包括学习率的动态调整以及权值更新的计算过程。
Adam算法的一个变种,Adamax,通过替换二阶矩估计为无穷阶矩,提供了额外的优化选项。对于想要深入了解的人,可以参考文献2进行进一步研究。通过理解这些优化算法,我们能更好地掌握深度学习模型的训练过程,从而提升模型性能。
如何使用stylegan训练自己的数据?
在探讨如何使用stylegan训练自己的数据之前,我们先回顾了上一篇内容中对DragGAN项目的正确部署方式,使得用户能够实现自由拖拽式的编辑。然而,上篇内容仅限于使用项目预置的,本篇将引领大家探索如何将项目应用扩展至任意的编辑。
实现这一目标的关键在于PTI项目。PTI允许用户将自定义训练成StyleGAN的潜空间模型,进而实现对任意的编辑。为确保操作环境满足需求,我们将继续在AutoDL云平台上使用Python 3.8和CUDA .8的镜像,确保环境配置符合项目要求。
在准备环境中,首先下载项目源码。不必担心缺失requirements.txt文件,因为已经准备妥当。接着,下载必要的预训练模型,即StyleGAN的生成器文件ffhq.pkl和预处理器文件align.dat,确保它们被放置在pretrained_models目录下。
进行预处理是关键步骤,其目标是完成人脸关键点的检测工作,从而将待编辑上传至image_original目录下。同时,调整utils/align_data.py文件中所包含的路径,并更新configs/paths_config.py中的参数设置。执行相关脚本以完成预处理过程。
接下来,使用PTI进行GAN反演,这一过程允许将映射到生成模型的潜空间中,并通过调整潜空间向量来修改图像外观。利用这种方式,可以实现对图像的多种编辑,包括姿势改变、外观特征修改或风格添加。通过编辑潜空间,可以实现对图像的高级编辑,同时确保图像的真实性和准确性。
完成反演后,需要将文件转换为DragGAN可识别的模型文件格式。通过提供的转换脚本,将pt文件转换为pkl文件格式。转换完成后,将checkpoints目录下的模型文件和对应的embeddings目录下的文件放入DragGAN项目的checkpoints目录下。最后,重启DragGAN,至此,训练自己的数据过程已告完成。
为了简化操作流程,我们已将上述步骤整合成Jupyter Notebook文档,提供了一键执行功能,使得用户能够轻松实现图像反演。只需确保将align.dat文件放入项目pretrained_models目录下,将visualizer_drag_gradio_custom.py放入项目根目录下,然后运行ipynb文件即可。
获取此整合包的方式已在原文末尾提供。此过程简化了操作步骤,使得即使是技术新手也能快速上手,实现对任意的高级编辑。通过遵循上述指南,您可以探索使用StyleGAN训练自定义数据的无限可能,为图像编辑领域带来创新与便利。