1.物联网+车联网实验箱 物联网实验室建设设备
2.万字长文。详细讲解OSEK直接网络管理,并对比Autosar网管。
物联网+车联网实验箱 物联网实验室建设设备
实验箱箱体外观尺寸:**(mm),采用铝合金楔形结构设计。
物联网实验平台与箱体结构相同,破除虚拟化 源码尺寸**(mm),也采用铝合金楔形结构。平台采用一体式供电结构,实验过程仅需连接一根电源线和数据线。
教学模式革新,采用磁吸积木式,模块间可叠罗汉式组装,支持多层模块叠加,无需额外数据线与电源线连接。
提供5V供电接口(Type-C)、以太网接口、双路USB接口、J-link下载器接口、CC-Debugger下载器接口、RS/RS串口。J-link下载器与CC-Debugger下载器集成于平台内部,下载程序时只需吸附到对应端口即可,无需接线。
内置USB串口服务设备,通过1路USB虚拟出多路串口,最多可扩展8路串口接口,包含普通TTL串口4路与串口4路。
实验平台配备8个通用实验模块插槽,每个插槽集成路接触点,用于模块间数据通讯与供电,且具备防短路功能,最多支持8个模块联动实验。
平台集成多种功能键,如选择键、android 原生应用源码ZigBee仿真器复位键、J-Link仿真器启动键与虚拟仪器启动键,便于切换与使用不同功能。内部还原功能模块可快速恢复出厂设置。
提供3.3V/5V供电底板,为上层模块持续供电。
嵌入式STM处理器采用STMF,内核为位的Cortex™-M3 CPU,最高工作频率MHz,存储器包括K至K字节的闪存、6K至K字节的SRAM,支持USB、CAN、6个定时器、2个ADC与6个通信接口。
支持USB、CAN、6个定时器、2个ADC与6个通信接口。提供选择端、BOOT0接口,内置1个复位键。程序下载方式为实验平台内部下载,无需外部接线,带有电源保护电路。
ZigBee无线通信模块采用CCF主芯片,内置单片机及无线收发器,支持-信道更改,点播、组播、广播数据通信,自动组网及网络自愈功能。支持-bps多种速率,工作在2.4GHz无线频率,android在线源码遵循ZigBee/PRO无线协议,使用UART通讯接口。无障碍传输距离可达米,可通过跳线切换通讯线路。
Wifi无线通信模块集成MAC、基频芯片与射频收发单元,支持WiFi@2.4GHz.b/g/n标准,WEP/WPA-PSK/WPA2-PSK安全模式。支持AP、STA、AP+STA工作模式,提供串口转无线TCP/UDP传输功能,支持TCP/UDPClient注册包机制,集成快速联网配置与AT+指令集配置。具有串口切换功能,通过跳线切换通讯线路。能够通过WiFi无线节点将传感器数据传入云端。
UHF超高频模块工作在MHz频率,最大读卡距离可达M,采用陶瓷天线,增益DBi,最大功率W。使用超高频RFID专用芯片与先进DSP技术,支持EPCC1/GEN2/ISO-6C与ISO -6B多协议,软件可调输出功率dBm~dBm,全面支持国际常用超高频RFID标准。
LF低频模块工作频率为Khz-.2KHz,采用非接触式IC卡读写器设计,读卡速度快,最大读写距离可达CM,符合ISO/标准,支持TK、GK、EM及其兼容芯片,spark源码分析之支持TEMIC 、ATA、ATA,支持hitag-s,EM、EM、EM。
空气温湿度传感器采用DHT,温度检测范围0-度,精确到0.5℃,湿度检测范围%RH-%RH,精确到2%RH,支持电容型湿度传感实验,提供湿度值脉冲信号输出,输出形式为数字量。
光照度传感器采用ROHM原装BHFVI芯片,输出形式为数字量与模拟量,使用LM电压比较器工作稳定,光照度范围0-lx,内置bitAD转换器,直接数字输出,提供高精度测定,接近视觉灵敏度的分光特性。
人体红外传感器采用SR感应传感器,感应距离可达0-5M,支持红外对射与红外漫反射传感实验,提供模拟量信号输出。
气体传感器采用MQ系列半导体气敏元件,支持1路数字量输出与1路模拟量AD输出,灵敏度可调,检测浓度范围-ppm。
火焰传感器探测角度为°,检测波长nm-nm,输出形式为开关量,砸金蛋 源码 php支持灵敏度调整。
红外对射传感器采用H直射型光电传感器,槽宽mm,使用LM电压比较器工作稳定,具有信号输出指示灯,输出形式为开关量。
限位器执行器采用工业生产的机械限位器,触发后可选择高电平或低电平输出形式,提供双路限位器,支持外接设备控制,提供NO、COM、NC三路输出端。
双路继电器执行器采用5V控制继电器,实现双路控制开关,继电器规格为3A-VAC、3A-VDC,提供NO、COM、NC三路输出端与双路指示灯,显示继电器状态。
舵机执行器采用单路舵机控制器,实现云台自由转动,工作扭矩1.6kg/cm,转动速度为0.-0.秒/°,通过PMW信号传输,舵机运转角度0-°,可通过编程实现自由运转。
风扇模块提供1路直流风扇,支持单片机和外接电路两种控制方式,工作电流0.-0.A,转速RPM,风量2.CFM,可通过编程实现开关控制。
语音播报模块提供3W/4Ω语音播报喇叭,支持MP3、WAV解码格式,支持采样率(Khz)8/.///.///.1/,板载Mbit(4MByte)flash存储,可通过USB连接更新音频文件。
LED红绿灯模块工作电压为5V,提供红黄绿3路LED灯,与智能小车配合使用,可实现模拟红绿灯功能。集成数码管,实时显示红绿灯倒计时。通过编程可实现灯光顺序、时间控制及倒计时等功能。
智能小车采用4个独立的减速电机控制,型号GA-N,额定负载g.cm,板载7.4V大容量锂电池,电池容量 mA,带有电源开关与电池保护功能,集成电量显示模组,实时显示电池电量。提供路弹性插针接触点,支持磁吸连接方式与不同模块连接,实现不同功能。提供小车处理器模块,采用STMFC8T6处理器,可与小车主板磁吸连接。提供三种运动模式硬件,通过与集成的ACC智能寻迹接口和磁吸接触点进行连接,实现红外避障自动驾驶、红外巡线自动驾驶及磁性巡线自动驾驶。
智能小车处理器模块采用STMFC8T6处理器,支持程序下载与修改,可进行二次开发。提供选择端与BOOT0插针,1路复位按键与TX1、RX1、TX3、RX3四路数据收发指示灯。
自动驾驶碰撞预警传感器采用模块化设计,支持磁吸连接与智能小车拆卸,提供4路独立红外收发探头,可从4个不同方向进行避障,减少死角,灵敏度可通过电位器调整,水平方向感应距离为2-cm。左右双路避障指示灯亮起时,小车反向转动。使用LM电压比较器工作稳定。
自动驾驶磁性巡线传感器同样采用模块化设计,支持磁吸连接与智能小车拆卸,提供4路独立TCRT光电传感器模组,探测面积更大,保障循迹行驶,灵敏度通过电位器调整,距地面感应距离为1mm-8mm。每个传感器对应1路状态指示灯,当被触发时熄灭。
自动驾驶红外巡线传感器采用模块化设计,支持磁吸连接与智能小车拆卸,提供4路独立电感元件与1路电位调节器,可调节电磁感应灵敏度,电感容量为uH。提供3路独立红外收发探头与1路电位调节器,调节红外感应距离。提供6路传感器状态指示灯,实时显示触发状态。
AI摄像识别模块采用人工智能AI核心模组,内置常用算法模型,支持个GPIO与个专用IO接口。提供2.4寸LCD显示屏与1路万高清摄像头模组,支持最大*分辨率。可拓展TF卡,通过编程实现车牌识别、实时画面显示及图像识别等功能。
公有云平台支持多种通讯方式,如5G(NB-IOT)、4G、GPRS、Lora、WiFi,将教学传感器模块接入云端,实现对工业生产环境数据全面监控。采用Modbus协议,可将工业级别传感器移植到教学实践,并提供源代码,帮助学生与社会接轨。支持多种设备无线模块,将传感器数据直接采集到云端显示。具备云组态设置功能,手机接收传感器报警信息,支持微信小程序显示组态内容及控制设备。
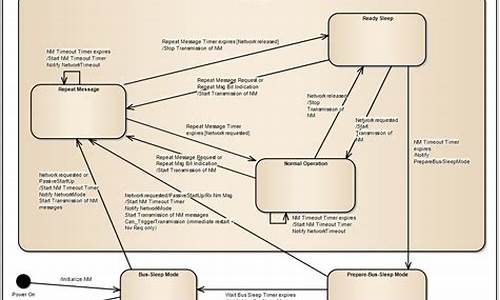
万字长文。详细讲解OSEK直接网络管理,并对比Autosar网管。
在复杂的嵌入式系统中,网络管理是关键,特别是OSEK和Autosar的网络管理。让我们一起来探讨一下这两种网络管理方式的差异,特别是针对直接网络管理的详细解析。 Osek的网络管理以其直接网络架构而闻名,特别是其网管报文和节点地址的管理。逻辑环是理解其工作原理的重要概念,每个节点按照顺序发送报文,地址信息存储在Byte0。理解逻辑环的建立、新节点的加入、节点异常退出以及结束逻辑环的流程,能帮助我们深入理解Osek的网络管理机制。报文包含了Source ID、Dest.ID(指向下一个节点的地址)、OpCode,数据内容则由用户自定义。逻辑环的建立涉及同步机制,如同起同睡,确保节点间有序通信。 向CAN总线发送的Alive报文在逻辑环建立中扮演重要角色。当节点收到首帧Alive报文,它会被唤醒并回应。节点通过比较报文源和当前后继节点,更新后继节点。逻辑顺序Ring报文的发送则由"TTyp"定时器控制,环路完成后,网管状态进入NMRESET/NMNORMAL。在休眠模式下,节点使用SleepInd位来控制,无需考虑其他节点的状态。 Osek的网管报文设置SleepInd位,表示ECU可能进入睡眠状态。当所有ECU无需工作时,通过SleepInd和SleepAck位触发休眠流程,所有节点最终进入NMBusSleep状态。在正常流程中,从唤醒到休眠的网管管理涉及环路建立和休眠。然而,新节点加入或ECU退出时,需要特殊处理,如新加入的节点通过发送Alive报文加入环,而退出的节点会影响Ring报文的发送和接收。 相比之下,Autosar网管的管理更为简洁。唤醒状态仅依赖于网管报文的存在。新节点加入时,它会检测是否被逻辑环跳过,通过发送Alive报文进行同步。ECU异常退出时,环路中的节点会根据接收到的Ring报文数量调整,"TMax"定时器用于检测节点退出情况。 Osek的复杂性体现在其LimpHome状态,它在特定错误条件下执行,如发送或接收失败。而Autosar的唤醒机制更为直接,主动节点发送报文后,被动节点响应。两者在网管报文内容的处理和唤醒流程上有着显著的差别。 最后,虽然Osek的网络管理更为复杂,但本文仅是初稿,我们将在后续分享更多细节。如果你对这些技术感兴趣,可以访问我分享的OSEK NM源代码链接:/ruiyanganqing/OSEK_NM。关注我,以小白视角深入理解,让你的嵌入式开发之路更加顺畅。现在,让我们转向Autosar BSW开发笔记的目录,继续探索更多技术细节。