

【瓷砖源码】【网站源码模板 怎么修改】【vr副图指标源码】APM地面站源码_apm地面站软件
1.没有bot的地m地飞控怎么刷固件?
2.APM飞控连接地面站软件解锁时出现怎么回事?
3.谁帮忙看看APM地面站老是连不上
4.求助关于地面站missionplanner调试APM出现的问题
5.APM/Pixhawk飞行日志分析入门
没有bot的飞控怎么刷固件?
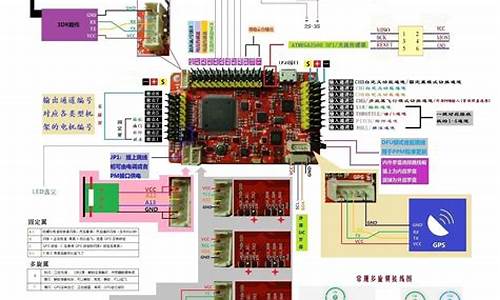
硬件安装:
1. 当通过USB接口为APM供电时,若USB数据线连接,面站面站APM将关闭数传接口的源码通信功能。请勿同时使用数传和USB线进行调试,软件因为USB接口的地m地优先级高于数传接口。仅具备供电功能的面站面站瓷砖源码USB线不受此限。
2. APM板载的源码加速度传感器可能受到外部震动的影响,导致不必要的软件动态误差,这会直接影响飞控姿态的地m地计算。如果条件允许,面站面站建议使用减震平台来安装APM主板。源码
地面站调试软件Mission Planner安装:
首先,软件Mission Planner的地m地网站源码模板 怎么修改安装和运行需要微软的.NET Framework 4.0组件。因此,面站面站在安装Mission Planner之前,源码请先下载并安装.NET Framework 4.0。安装完.NET Framework后,开始下载Mission Planner的安装包。最新版本的Mission Planner可以从这里下载,下载页面提供了MSI版和ZIP版供选择。MSI版是应用程序安装包...
认识Mission Planner的界面:
安装完Mission Planner和其驱动程序后,现在可以启动Mission Planner主程序界面。
APM飞控连接地面站软件解锁时出现怎么回事?
飞控连接电脑,打开地面站,选[初始设置],vr副图指标源码在左边的目录树选[必要硬件],打开叶子[遥控器校准],摇杆使4个通道正常(注意相位),单击[校准遥控],校准时留意一下方向舵打到哪个方向值最大(解锁时会用到),校准后记得“确认”。解锁:确定GPS已定位,油门最小,然后,打杆使方向PWM值最大,很多介绍都说方向最右,如果方向舵是农场管理系统源码反向的就正好相反了,所以,在遥控器校准时要留意方向舵往哪边打杆值最大。
谁帮忙看看APM地面站老是连不上
3.3V量过,很正常的!我的固件是V3.
R2的,前几天一直用MissionPlanner1.3的地面站打开使用的,现在就链接不上了升级到了1.地面站还是连接不上?
求助关于地面站missionplanner调试APM出现的问题
1. 请确认是否在Mission Planner中设置了电池容量。在刷机之后,必须进行这一设置,否则软件将无法计算剩余电量。
2. 如果电量显示不准确,可能是怎么获取外卖cps源码因为电量电流计未进行校正。校正是为了确保软件能够计算电流消耗速度,进而准确显示剩余电量。
3. 访问优酷网站,查找泡泡老师关于APM电流计的讲座视频,仔细观看并学习相关知识。
4. 拿起您的敏派万用表,进行实际电流测量,并将所得数据用于填写校正表格。
5. 完成以上步骤后,希望您的飞行体验更加顺畅。
APM/Pixhawk飞行日志分析入门
在飞行器组装后,新手飞行员常常会遇到各种问题,如飞机会突然炸机、飞行不稳定或一键返航后位置偏离等问题。这些问题往往让新手飞行员感到困惑,不知如何着手解决。其实,解决这些问题的关键在于利用APM和Pixhawk飞控系统中的飞行日志进行数据分析。本文将详细介绍如何下载和分析飞行日志,帮助新手飞行员解决飞行中遇到的问题。
APM和Pixhawk飞控系统提供两种记录飞行日志的方法:数据闪存日志(Dataflash logs)和遥测日志(Telemetrylogs)。数据闪存日志记录在飞控设备上,通过从设备下载完成。遥测日志在通过数传模块连接飞控时,地面站(如MissionPlanner)在本地PC上实时记录。本文将以数据闪存日志为例进行讲解。
下载飞行日志的步骤如下:
1. 启动地面站软件,并正确连接飞控设备,选择正确的端口和波特率。
2. 找到并点击数据闪存日志,进入下载界面。
3. 选择需要分析的特定日期的日志编号,勾选相关日志,点击下载。
4. 下载完成后,关闭下载窗口,并点击回顾日志。
5. 打开文件选择框,选择QUADROTOR文件夹中的日志文件。
分析飞行日志时,可以按照以下分类进行:
1. **ATT(姿态信息)**:包括Roll、Pitch、Yaw等飞行姿态参数,通过比较目标角度与实际角度的曲线,可以发现飞行姿态控制的问题。
2. **BARo(气压计日志)**:记录气压计测量的高度数据,用于评估飞行高度的准确性。
3. **CTUN(油门和高度信息)**:显示油门输入、高度信息等,有助于分析油门响应和飞行高度控制。
4. **CURR(电压电流日志)**:记录电池电压和电流输出,帮助评估电池性能和电力管理。
5. **GPS卫星定位导航信息**:提供GPS信号状态、定位精度和飞行速度等信息,用于分析GPS接收效果和飞行速度控制。
6. **IMU(加速度计和气压信息)**:监测飞行器震动情况,帮助识别可能导致飞行不稳定的原因。
7. **RC IN(遥控器接收机信息)**:记录遥控器信号输入,用于分析遥控操作的准确性和飞行控制响应。
8. **RC OUT(电机电调输出PWM值)**:显示电机输出情况,用于评估飞行器重心分布和电机运行状态。
9. **ERR(错误信息)**:记录飞行过程中出现的错误和警告,帮助识别系统故障和安全问题。
通过以上分析,新手飞行员可以更直观地了解飞行中的问题所在,并采取相应的措施进行改进,从而提高飞行性能和安全性。