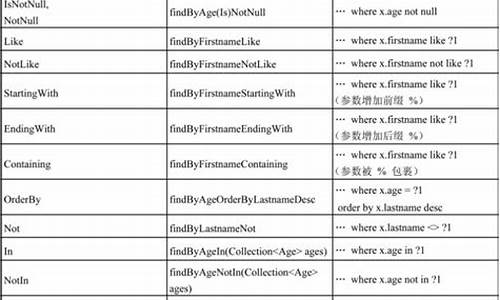
1.å¦ä½ç¼è¯arm linuxçgo
2.linuxè¿è¡armç¨åºarmlinuxç¨åº
3.armlinuxå®è£
apkarmlinuxå®è£
4.åºç§è½¦è®¡ä»·å¨

å¦ä½ç¼è¯arm linuxçgo
Golangä¹å°±æ¯Goè¯è¨ï¼ç°å¨å·²ç»åè¡å°1.4.1çæ¬äºï¼è¯è¨ç¹æ§ä¼è¶æ§åèåGoogle强大é å±±ä»ä¹çå°±ä¸å¤è¯´äºãGolangçå®æ¹æä¾äºå¤ä¸ªå¹³å°ä¸çäºè¿å¶å®è£ å ï¼éæ¾çæ¯å¹¶é没æåå¸ARMå¹³å°çäºè¿å¶å®è£ å ãARMå¹³å°æ²¡åæ³ç´æ¥ä»å®ç½ä¸è½½äºè¿å¶å®è£ å æ¥å®è£ ï¼å¥½å¨Golangæ¯æ¯æå¤å¹³å°å¹¶ä¸å¼æºçè¯è¨ï¼å æ¤å¯ä»¥éè¿ç´æ¥å¨ARMå¹³å°ä¸ç¼è¯æºä»£ç æ¥å®è£ ãæ´ä¸ªè¿ç¨ä¸»è¦å æ¬ç¼è¯å·¥å ·é ç½®ãè·åGolangæºä»£ç ã设置Golangç¼è¯ç¯å¢åéãç¼è¯ãé ç½®Golangè¡ç¯å¢åéçæ¥éª¤ã
注ï¼æ¬æéç¨æ èæ´¾åæµè¯ï¼å 为æ èæ´¾æ¯åºäºARMå¹³å°çã
1ãç¼è¯å·¥å ·é ç½®
æ®è¯´ä¸ä¸ªçæ¬çgolangç¼è¯å·¥å ·è¦ä½¿ç¨golangèªå·±æ¥åï¼ä½ç®åè¿æ¯ä½¿ç¨Cç¼è¯å·¥å ·çãå æ¤ï¼é¦å è¦é 置好Cç¼è¯å·¥å ·ï¼
1.1 å¨UbuntuæDebianå¹³å°ä¸å¯ä»¥ä½¿ç¨sudo apt-get install gcc libc6-devå½ä»¤å®è£ ï¼æ èæ´¾çRaspBianç³»ç»æ¯åºäºDebianä¿®æ¹çï¼æ以å¯ä»¥ä½¿ç¨è¿ç§æ¹æ³å®è£ ã
1.2 å¨RedHatæCentOS 6å¹³å°ä¸å¯ä»¥ä½¿ç¨sudo yum install gcc libc-develå½ä»¤å®è£ ã
å®è£ å®æåå¯ä»¥è¾å ¥ gcc --versionå½ä»¤éªè¯æ¯å¦æåå®è£ ã
2ãè·ågolangæºä»£ç
2.1 ç´æ¥ä»å®ç½ä¸è½½æºä»£ç å缩å ã
golangå®ç½æä¾golangçæºä»£ç å缩å ï¼å¯ä»¥ç´æ¥ä¸è½½ï¼ææ°ç1.4.1çæ¬æºä»£ç é¾æ¥ï¼/golang/go1.4.1.src.tar.gz
2.2 使ç¨gitå·¥å ·è·åã
golang使ç¨gitçæ¬ç®¡çå·¥å ·ï¼ä¹å¯ä»¥ä½¿ç¨gitè·ågolangæºä»£ç ãæ¨è使ç¨è¿ä¸ªæ¹æ³ï¼å 为以åå¯ä»¥éæ¶è·åææ°çgolangæºä»£ç ã
2.2.1 é¦å 确认ARMå¹³å°ä¸å·²ç»å®è£ äºgitå·¥å ·ï¼å¯ä»¥ä½¿ç¨git --versionå½ä»¤ç¡®è®¤ãä¸è¬linuxå¹³å°é½å®è£ äºgitï¼æ²¡æçè¯å¯ä»¥èªè¡å®è£ ï¼ä¸åå¹³å°çå®è£ æ¹æ³å¯ä»¥åèï¼/download/linux
2.2.2 å éè¿ç¨golangçgitä»åºå°æ¬å°
å¨ç»ç«¯cdå°ä½ æ³è¦å®è£ golangçç®å½ï¼ç¡®ä¿è¯¥ç®å½ä¸æ²¡æå为goçç®å½ãç¶å以ä¸å½ä»¤è·å代ç ä»åºï¼
git clone /go
大éå°åºå¯è½ä¼è·å失败ï¼å¨ä¸ç¿»å¢çæ åµä¸æè¯äºå 次é½æ²¡æåï¼åå 大家é½æçã好å¨googleå·²ç»å°golangä¹æ管å°githubä¸é¢ï¼æ以ä¹å¯ä»¥éè¿ä¸é¢å½ä»¤è·åï¼
git clone /golang/go.git
è§ç½ç»æ åµï¼ä¸è½½å¯è½éè¦ä¸å°æ¶é´ãæ2Mç带宽è±äºå°è¿ä¸¤ä¸ªå°æ¶æä¸è½½å®ï¼è½ç¶æ´ä¸ªé¡¹ç®ä¸è¿å åå = =
ä¸è½½å®æåï¼å¯ä»¥çå°ç®å½ä¸å¤äºä¸ä¸ªgoç®å½ï¼éé¢å³ä¸ºgolangçæºä»£ç ï¼å¨ç»ç«¯ä¸æ§è¡cd goå½ä»¤è¿å ¥è¯¥ç®å½ã
æ§è¡ä¸é¢å½ä»¤æ£åºgo1.4.1çæ¬çæºä»£ç ï¼å 为ç°å¨å·²ç»ææ°ç代ç æ交ä¸å»äºï¼ææ°ç代ç å¯è½ä¸æ¯æ稳å®çï¼
git checkout go1.4.1
è³æ¤ï¼ææ°1.4.1åè¡ççæºä»£ç è·åå®æ¯
3ã设置golangçç¼è¯ç¯å¢åé
主è¦æGOROOTãGOOSãGOARCHãGOARMå个ç¯å¢åééè¦è®¾ç½®ï¼å 解éå个ç¯å¢åéçæä¹ã
3.1 GOROOT
主è¦ä»£è¡¨golangæ ç»æç®å½çè·¯å¾ï¼ä¹å°±æ¯ä¸é¢gitæ£åºçgoç®å½ãä¸è¬å¯ä»¥ä¸ç¨è®¾ç½®è¿ä¸ªç¯å¢åéï¼å 为ç¼è¯çæ¶åé»è®¤ä¼ä»¥goç®å½ä¸srcåç®å½ä¸çall.bashèæ¬è¿è¡æ¶çç¶ç®å½ä½ä¸ºGOROOTçå¼ã为äºä¿é©èµ·è§ï¼å¯ä»¥ç´æ¥è®¾ç½®ä¸ºgoç®å½çè·¯å¾ã
3.2 GOOSåGOARCH
åå«ä»£è¡¨ç¼è¯çç®æ ç³»ç»åå¹³å°ï¼å¯éå¼å¦ä¸ï¼
GOOS GOARCH
darwin
darwin amd
dragonfly
dragonfly amd
freebsd
freebsd amd
freebsd arm
linux
linux amd
linux arm
netbsd
netbsd amd
netbsd arm
openbsd
openbsd amd
plan9
plan9 amd
solaris wegame多开源码 amd
windows
windows amd
éè¦æ³¨æçæ¯è¿ä¸¤ä¸ªå¼ä»£è¡¨çæ¯ç®æ ç³»ç»åå¹³å°ï¼èä¸æ¯ç¼è¯æºä»£ç çç³»ç»åå¹³å°ãæ èæ´¾çRaspBianæ¯linuxç³»ç»ï¼æ以è¿äºGOOS设置为linuxï¼GOARCH设置为armã
3.3 GOARM
表示使ç¨çæµ®ç¹è¿ç®åå¤çå¨çæ¬å·ï¼åªå¯¹armå¹³å°æç¨ï¼å¯éå¼æ5ï¼6ï¼7ãå¦ææ¯å¨ç®æ å¹³å°ä¸ç¼è¯æºä»£ç ï¼è¿ä¸ªå¼å¯ä»¥ä¸è®¾ç½®ï¼å®ä¼èªå¨å¤æéè¦ä½¿ç¨åªä¸ä¸ªçæ¬ã
æ»ç»ä¸æ¥ï¼å¨æ èæ´¾ä¸è®¾ç½®golangçç¼è¯ç¯å¢åéï¼å¯ç¼è¾$HOME/.bashrcæ件ï¼å¨æ«å°¾æ·»å ä¸é¢å 容ï¼
export GOROOT=ä½ çgoç®å½è·¯å¾
export GOOS=linux
export GOARCH=arm
ç¼è¾å®åä¿åï¼æ§è¡source ~/.bashrcå½ä»¤è®©ä¿®æ¹çæã
4ãç¼è¯æºä»£ç
ç¯å¢åéé ç½®å®æèªåå°±å¯ä»¥å¼å§ç¼è¯æºä»£ç ãå¨goç®å½ä¸çsrcåç®å½ä¸ï¼ä¸»è¦æall.bashåmake.bash两个èæ¬ï¼å¦å¤è¿æ两个all.batåmake.batèæ¬éç¨äºwindowå¹³å°ï¼ãç¼è¯å®é ä¸å°±æ¯æ§è¡å ¶ä¸ä¸ä¸ªèæ¬ï¼ä¸¤è çåºå«å¨äºall.bashå¨ç¼è¯å®æåè¿ä¼æ§è¡ä¸äºæµè¯å¥ä»¶ãå¦æå¸æåªç¼è¯ä¸æµè¯ï¼å¯ä»¥è¿è¡make.bashèæ¬ã使ç¨cdå½ä»¤è¿å ¥goä¸srcç®å½ï¼æ§è¡./all.bashæè ./make.bashå½ä»¤å³å¯å¼å§ç¼è¯ãç±äºç¡¬ä»¶æ åµä¸åï¼ç¼è¯èè´¹çæ¶é´ä¸åãå¨æçBåæ èæ´¾ç¼è¯è¿ç¨è±è´¹äºå°è¿å个å°æ¶ï¼ç¼è¯å®æåæ§è¡çæµè¯å¥ä»¶åè±è´¹äºå·®ä¸å¤ä¸ä¸ªå°æ¶ï¼æ»å ±è±è´¹äºä¸ä¸ªåå°æ¶å·¦å³ã
5ãé ç½®golangè¿è¡ç¯å¢åé
ç¼è¯å®æåï¼goç®å½ä¸ä¼çæbinç®å½ï¼éé¢å°±æ¯goçè¿è¡èæ¬ã为äºä»¥å使ç¨æ¹æ³ï¼å¯ä»¥å°è¿ä¸ªbinè·¯å¾æ·»å å°PATHç¯å¢åéä¸ãåæ ·ç¼è¾~/.bashrcæ件ï¼å 为åé¢è®¾ç½®è¿GOROOTç¯å¢åéæågoç®å½äºï¼æ以åªéè¦å¨æ«å°¾å ä¸
export PATH=$PATH:$GOROOT/bin
ä¿åååæ ·æ§è¡source ~/.bashrcå½ä»¤è®©ç¯å¢åéçæã
è³æ¤ï¼golangæºä»£ç ç¼è¯å®è£ æåãæ§è¡go versionåºè¯¥å°±è½çå°å½ågolangççæ¬ä¿¡æ¯ï¼è¡¨ç¤ºç¼è¯å®è£ æåã
linuxè¿è¡armç¨åºarmlinuxç¨åº
å¦ä½ç¼è¯armlinuxçgoï¼Golangä¹å°±æ¯Goè¯è¨ï¼ç°å¨å·²ç»åè¡å°1.4.1çæ¬äºï¼è¯è¨ç¹æ§ä¼è¶æ§åèåGoogle强大é å±±ä»ä¹çå°±ä¸å¤è¯´äºãGolangçå®æ¹æä¾äºå¤ä¸ªå¹³å°ä¸çäºè¿å¶å®è£ å ï¼éæ¾çæ¯å¹¶é没æåå¸ARMå¹³å°çäºè¿å¶å®è£ å ãARMå¹³å°æ²¡åæ³ç´æ¥ä»å®ç½ä¸è½½äºè¿å¶å®è£ å æ¥å®è£ ï¼å¥½å¨Golangæ¯æ¯æå¤å¹³å°å¹¶ä¸å¼æºçè¯è¨ï¼å æ¤å¯ä»¥éè¿ç´æ¥å¨ARMå¹³å°ä¸ç¼è¯æºä»£ç æ¥å®è£ ãæ´ä¸ªè¿ç¨ä¸»è¦å æ¬ç¼è¯å·¥å ·é ç½®ãè·åGolangæºä»£ç ã设置Golangç¼è¯ç¯å¢åéãç¼è¯ãé ç½®Golangè¡ç¯å¢åéçæ¥éª¤ã
注ï¼æ¬æéç¨æ èæ´¾åæµè¯ï¼å 为æ èæ´¾æ¯åºäºARMå¹³å°çã
1ãç¼è¯å·¥å ·é ç½®
æ®è¯´ä¸ä¸ªçæ¬çgolangç¼è¯å·¥å ·è¦ä½¿ç¨golangèªå·±æ¥åï¼ä½ç®åè¿æ¯ä½¿ç¨Cç¼è¯å·¥å ·çãå æ¤ï¼é¦å è¦é 置好Cç¼è¯å·¥å ·ï¼
1.1å¨UbuntuæDebianå¹³å°ä¸å¯ä»¥ä½¿ç¨sudoapt-getinstallgcclibc6-devå½ä»¤å®è£ ï¼æ èæ´¾çRaspBianç³»ç»æ¯åºäºDebianä¿®æ¹çï¼æ以å¯ä»¥ä½¿ç¨è¿ç§æ¹æ³å®è£ ã
1.2å¨RedHatæCentOS6å¹³å°ä¸å¯ä»¥ä½¿ç¨sudoyuminstallgcclibc-develå½ä»¤å®è£ ã
å®è£ å®æåå¯ä»¥è¾å ¥gcc--versionå½ä»¤éªè¯æ¯å¦æåå®è£ ã
2ãè·ågolangæºä»£ç
2.1ç´æ¥ä»å®ç½ä¸è½½æºä»£ç å缩å ã
golangå®ç½æä¾golangçæºä»£ç å缩å ï¼å¯ä»¥ç´æ¥ä¸è½½ï¼ææ°ç1.4.1çæ¬æºä»£ç é¾æ¥ï¼/golang/go1.4.1.src.tar.gz
2.2使ç¨gitå·¥å ·è·åã
golang使ç¨gitçæ¬ç®¡çå·¥å ·ï¼ä¹å¯ä»¥ä½¿ç¨gitè·ågolangæºä»£ç ãæ¨è使ç¨è¿ä¸ªæ¹æ³ï¼å 为以åå¯ä»¥éæ¶è·åææ°çgolangæºä»£ç ã
2.2.1é¦å 确认ARMå¹³å°ä¸å·²ç»å®è£ äºgitå·¥å ·ï¼å¯ä»¥ä½¿ç¨git--versionå½ä»¤ç¡®è®¤ãä¸è¬linuxå¹³å°é½å®è£ äºgitï¼æ²¡æçè¯å¯ä»¥èªè¡å®è£ ï¼ä¸åå¹³å°çå®è£ æ¹æ³å¯ä»¥åèï¼/download/linux
2.2.2å éè¿ç¨golangçgitä»åºå°æ¬å°
å¨ç»ç«¯cdå°ä½ æ³è¦å®è£ golangçç®å½ï¼ç¡®ä¿è¯¥ç®å½ä¸æ²¡æå为goçç®å½ãç¶å以ä¸å½ä»¤è·å代ç ä»åºï¼
gitclone/go
大éå°åºå¯è½ä¼è·å失败ï¼å¨ä¸ç¿»å¢çæ åµä¸æè¯äºå 次é½æ²¡æåï¼åå 大家é½æçã好å¨googleå·²ç»å°golangä¹æ管å°githubä¸é¢ï¼æ以ä¹å¯ä»¥éè¿ä¸é¢å½ä»¤è·åï¼
gitclone/golang/go.git
è§ç½ç»æ åµï¼ä¸è½½å¯è½éè¦ä¸å°æ¶é´ãæ2Mç带宽è±äºå°è¿ä¸¤ä¸ªå°æ¶æä¸è½½å®ï¼è½ç¶æ´ä¸ªé¡¹ç®ä¸è¿å åå ==
ä¸è½½å®æåï¼å¯ä»¥çå°ç®å½ä¸å¤äºä¸ä¸ªgoç®å½ï¼éé¢å³ä¸ºgolangçæºä»£ç ï¼å¨ç»ç«¯ä¸æ§è¡cdgoå½ä»¤è¿å ¥è¯¥ç®å½ã
æ§è¡ä¸é¢å½ä»¤æ£åºgo1.4.1çæ¬çæºä»£ç ï¼å 为ç°å¨å·²ç»ææ°ç代ç æ交ä¸å»äºï¼ææ°ç代ç å¯è½ä¸æ¯æ稳å®çï¼
gitcheckoutgo1.4.1
è³æ¤ï¼ææ°1.4.1åè¡ççæºä»£ç è·åå®æ¯
3ã设置golangçç¼è¯ç¯å¢åé
主è¦æGOROOTãGOOSãGOARCHãGOARMå个ç¯å¢åééè¦è®¾ç½®ï¼å 解éå个ç¯å¢åéçæä¹ã
3.1GOROOT
主è¦ä»£è¡¨golangæ ç»æç®å½çè·¯å¾ï¼ä¹å°±æ¯ä¸é¢gitæ£åºçgoç®å½ãä¸è¬å¯ä»¥ä¸ç¨è®¾ç½®è¿ä¸ªç¯å¢åéï¼å 为ç¼è¯çæ¶åé»è®¤ä¼ä»¥goç®å½ä¸srcåç®å½ä¸çall.bashèæ¬è¿è¡æ¶çç¶ç®å½ä½ä¸ºGOROOTçå¼ã为äºä¿é©èµ·è§ï¼å¯ä»¥ç´æ¥è®¾ç½®ä¸ºgoç®å½çè·¯å¾ã
3.2GOOSåGOARCH
åå«ä»£è¡¨ç¼è¯çç®æ ç³»ç»åå¹³å°ï¼å¯éå¼å¦ä¸ï¼
GOOSGOARCH
darwin
darwinamd
dragonfly
dragonflyamd
freebsd
freebsdamd
freebsdarm
linux
linuxamd
linuxarm
netbsd
netbsdamd
netbsdarm
openbsd
openbsdamd
plan
plan9amd
solarisamd
windows
windowsamd
éè¦æ³¨æçæ¯è¿ä¸¤ä¸ªå¼ä»£è¡¨çæ¯ç®æ ç³»ç»åå¹³å°ï¼èä¸æ¯ç¼è¯æºä»£ç çç³»ç»åå¹³å°ãæ èæ´¾çRaspBianæ¯linuxç³»ç»ï¼æ以è¿äºGOOS设置为linuxï¼GOARCH设置为armã
3.3GOARM
表示使ç¨çæµ®ç¹è¿ç®åå¤çå¨çæ¬å·ï¼åªå¯¹armå¹³å°æç¨ï¼å¯éå¼æ5ï¼6ï¼7ãå¦ææ¯å¨ç®æ å¹³å°ä¸ç¼è¯æºä»£ç ï¼è¿ä¸ªå¼å¯ä»¥ä¸è®¾ç½®ï¼å®ä¼èªå¨å¤æéè¦ä½¿ç¨åªä¸ä¸ªçæ¬ã
æ»ç»ä¸æ¥ï¼å¨æ èæ´¾ä¸è®¾ç½®golangçç¼è¯ç¯å¢åéï¼å¯ç¼è¾$HOME/.bashrcæ件ï¼å¨æ«å°¾æ·»å ä¸é¢å 容ï¼
exportGOROOT=ä½ çgoç®å½è·¯å¾
exportGOOS=linux
exportGOARCH=arm
ç¼è¾å®åä¿åï¼æ§è¡source~/.bashrcå½ä»¤è®©ä¿®æ¹çæã
4ãç¼è¯æºä»£ç
ç¯å¢åéé ç½®å®æèªåå°±å¯ä»¥å¼å§ç¼è¯æºä»£ç ãå¨goç®å½ä¸çsrcåç®å½ä¸ï¼ä¸»è¦æall.bashåmake.bash两个èæ¬ï¼å¦å¤è¿æ两个all.batåmake.batèæ¬éç¨äºwindowå¹³å°ï¼ãç¼è¯å®é ä¸å°±æ¯æ§è¡å ¶ä¸ä¸ä¸ªèæ¬ï¼ä¸¤è çåºå«å¨äºall.bashå¨ç¼è¯å®æåè¿ä¼æ§è¡ä¸äºæµè¯å¥ä»¶ãå¦æå¸æåªç¼è¯ä¸æµè¯ï¼å¯ä»¥è¿è¡make.bashèæ¬ã使ç¨cdå½ä»¤è¿å ¥goä¸srcç®å½ï¼æ§è¡./all.bashæè ./make.bashå½ä»¤å³å¯å¼å§ç¼è¯ãç±äºç¡¬ä»¶æ åµä¸åï¼ç¼è¯èè´¹çæ¶é´ä¸åãå¨æçBåæ èæ´¾ç¼è¯è¿ç¨è±è´¹äºå°è¿å个å°æ¶ï¼ç¼è¯å®æåæ§è¡çæµè¯å¥ä»¶åè±è´¹äºå·®ä¸å¤ä¸ä¸ªå°æ¶ï¼æ»å ±è±è´¹äºä¸ä¸ªåå°æ¶å·¦å³ã
5ãé ç½®golangè¿è¡ç¯å¢åé
ç¼è¯å®æåï¼goç®å½ä¸ä¼çæbinç®å½ï¼éé¢å°±æ¯goçè¿è¡èæ¬ã为äºä»¥å使ç¨æ¹æ³ï¼å¯ä»¥å°è¿ä¸ªbinè·¯å¾æ·»å å°PATHç¯å¢åéä¸ãåæ ·ç¼è¾~/.bashrcæ件ï¼å 为åé¢è®¾ç½®è¿GOROOTç¯å¢åéæågoç®å½äºï¼æ以åªéè¦å¨æ«å°¾å ä¸
exportPATH=$PATH:$GOROOT/bin
ä¿åååæ ·æ§è¡source~/.bashrcå½ä»¤è®©ç¯å¢åéçæã
è³æ¤ï¼golangæºä»£ç ç¼è¯å®è£ æåãæ§è¡goversionåºè¯¥å°±è½çå°å½ågolangççæ¬ä¿¡æ¯ï¼è¡¨ç¤ºç¼è¯å®è£ æåã
linuxä¸ARMå¹³å°ç¼è¯ç¼åçå®æç¨åºå¦ä½å¨windowsç¯å¢ä¸è¿è¡ï¼
ç´æ¥å¨windowä¸è¿è¡ä¸äºãåªè½å¨windowä¸å®è£ èææºï¼åå®è£ linuxç³»ç»ï¼å¨èææºä¸çlinuxégccç¼è¯ä½ çç¨åº.
armææ¯éè¦å¦ä»ä¹ä¸ä¸ï¼
åå¼å§ï¼1ï¼å¦ä¹ Linuxç³»ç»å®è£ ã常ç¨å½ä»¤ãåºç¨ç¨åºå®è£ ã2ï¼å¦ä¹ Linuxä¸çCç¼ç¨ãè¿æ¬ä¹¦å¿ å¦ãUNIXç¯å¢é«çº§ç¼ç¨ãããUNIXç½ç»ç¼ç¨ãï¼RechardStevensåçï¼Cé«æ大é½å¦ä¹ è¿ãCåæéãããC缺é·ä¸é·é±ãããé«è´¨éC/C++ç¼ç¨æåãããCä¸å®¶ç¼ç¨ãããTheCprogrammingLanguageã3ï¼ç¨åºå大é½è¦å¦ï¼æ°æ®ç»æï¼åµå ¥å¼ç¨åºåæ°æ®ç»æå¿ å¦ï¼4ï¼åºå±å¼å人å大é½è¦å¦ï¼å¾®æºåçã计ç®æºä½ç³»ç»æï¼åµå ¥å¼å¼å人åå¿ å¦ï¼5ï¼åçæºå¯ä»¥è®©ä¸ä¸ªä»äºè½¯ä»¶å¼åç人äºè§£åå¦ä½æä½ç¡¬ä»¶ï¼æå¿ è¦å¦ï¼å 为ä¸å¼å§å°±ä»ARMå ¥æï¼ä¸å¤ªç°å®ï¼6ï¼ARMä½ç³»ç»æï¼å ¶ä¸ææ±ç¼ã7ï¼æ°åçµè·¯æå¿ è¦å¦ä¹ ï¼ä¸ç¶ä½ å¨ååºå±å¼åæ¶ççä¼ä¸ç¥éæä¹çåçå¾ï¼èµ·ç ä¹å¾æä¸å ¥é¨å§ã8ï¼ARM+Linuxåºç¨ç¨åºå¼åï¼åææ¯è¦æå¼åæ¿ï¼å°æ¤ï¼å强ç®æ¯å¨åµå ¥å¼Linuxè¿ä¸ªè¡ä¸æäºåæ¥å ¥é¨äºï¼ä½éæ¾çæ¯è¿è¿è¿è¿ä¸å¤ï¼è¿å¾ç»§ç»ï¼å 为è¿ä¸åµå ¥å¼ï¼å¾åæé«æã9ï¼è¦ååºå±å¼åï¼å°±å¿ é¡»ç¥é软硬件ä¹é´æ¯å¦ä½è¡æ¥åé åå·¥ä½çï¼é£ä¹çµåææ¯åºè¯¥è¦å¥½å¥½å¦ä¹ äºï¼å¾å¤æ¶åä¼ç¨å°æ¨¡æçµè·¯ç¥è¯ï¼è¿æ¯åºå«å¥½æä¸èé¸çä¸åä¹å¤ä¹ä¸ãï¼Linuxä¸çæ±ç¼è¦å¦ï¼è¿æ ·ä½ æè½çæ£äºè§£ä½ åçç¨åºæ¯å¦ä½å¨ä¸ä¸ªç¹å®ç硬件ä¸è·çãè¿æ¯åºå«å¥½æä¸èé¸çä¸åä¹å¤ä¹äºãï¼TCP/IPåè®®æ è¦å¦ï¼ææçåµå ¥å¼é«æé½å¾ææ¡çä¸è¥¿ï¼è¿æ¯åºå«å¥½æä¸èé¸çä¸åä¹å¤ä¹ä¸ãï¼æäºè¿äºä¸è¥¿ï¼æ¿ä¸Linux驱å¨å·²ç»ä¸åè¯ä¸ï¼éè¦ä½ å»å¦ä¹ Linuxå æ ¸æºä»£ç åLinux驱å¨ç¨åºè®¾è®¡ï¼è¿æ¯ä¸ä¸ªææ¯ååãå°æ¤ï¼ä½ å·²ç»ç®æ¯åµå ¥å¼Linuxçä¸çº§äººç©äºï¼ç»§ç»å¾ä¸ï¼ï¼é³é¢ãè§é¢ç解ç è¯ç ææ¯ä½ å¾å¦ãï¼åç§ICï¼åç§bootloaderä½ è½å¤åä¸å ¶å¼å设计ãï¼èªè¡è®¾è®¡å¼åæ°äº§åï¼æ°ææ¯ã
armççubuntuå¯ä»¥å®è£ ä»ä¹è½¯ä»¶?å¯ä»¥åxubuntuç软件éç¨åï¼
æ¶æä¸ä¸æ ·ä¸ä¸ªxä¸ä¸ªarmï¼è½¯ä»¶ä¸è½éç¨ï¼ä¸è¿linuxä¸è¬é½æä¾æºä»£ç çï¼ç¨arm-linux-gccç¼è¯ä¸ä¸å°±è½ç¨äº.
armlinuxå®è£ apkarmlinuxå®è£
å®è£ 好arm-linux-gccåï¼å¦ä½è®¾ç½®ç¯å¢åéï¼ä»¥ä¸3ä¸ªå ¶å®é½æ¯ä¸æ ·çä½ç¨ï¼é½æ¯éè¿æ¹åPATHç¯å¢åéã
ä¸åçæ¯ï¼/etc/profileæ¯å¨å¯å¨ä¸ä¸ªäº¤äºç»éshellçæ¶å被è°ç¨ï¼éè¿/bin/loginç»éï¼TTYä¸çå¼æºç»å½å°±æ¯è¿ä¸ªï¼/etc/bashrcåæ¯å¨ä¸ä¸ªäº¤äºçéç»éshellå¯å¨çæ¶å被è°ç¨ï¼éè¿å½ä»¤è¡è¿è¡ï¼ä¾å¦å¨å½ä»¤è¡è¾å ¥bashï¼æ以æä¹è®¾ç½®å°±è¦çéè¦ï¼ä¸è¬æ¥è¯´ï¼åè¿ç§è®¾ç½®å·¥å ·é¾çç¯å¢åéï¼è®¾ç½®å¨/etc/profileéä¼æ´å 好ãexportæ¯ä¸ä¸ªç¨äºè®¾ç½®ç¯å¢åéçæ令ï¼ä½æ¯BASHæ¯æç´æ¥è®¾ç½®ï¼æ以å¦æä½ çæºå¨æ¯BASHä½ä¸ºshellçè¯ï¼ä¸è¬Linuxé½æ¯çï¼ï¼å¯ä»¥ä¸ä½¿ç¨exportãpathmungeä¹æ¯ä¸ä¸ªæ令ï¼æ¯ä¸ä¸ªç´æ¥ç¨äºæ·»å è·¯å¾å°PATHç¯å¢åéçæ令ãlinuxä¸å¦ä½å®è£ å®åçAPKå ï¼
1ãå¨linuxä¸å®è£ virtualboxï¼ç¶åå®è£ å¶å®åç³»ç»ï¼åç¥å®è£ apk2ãå°è¯å®è£ shashlinkï¼è¿ä¸ªæ¯å®åçä¸ä¸ªæ¨¡æåºï¼ä¸è¬æ¥è¯´ï¼æ¯æéxçå®åçapkæå¯ä»¥è¿è¡ï¼åªæ¯æarmçä¸è½è¿è¡ã
å¦ä½ç¼è¯armlinuxçgoï¼
Golangä¹å°±æ¯Goè¯è¨ï¼ç°å¨å·²ç»åè¡å°1.4.1çæ¬äºï¼è¯è¨ç¹æ§ä¼è¶æ§åèåGoogle强大é å±±ä»ä¹çå°±ä¸å¤è¯´äºãGolangçå®æ¹æä¾äºå¤ä¸ªå¹³å°ä¸çäºè¿å¶å®è£ å ï¼éæ¾çæ¯å¹¶é没æåå¸ARMå¹³å°çäºè¿å¶å®è£ å ãARMå¹³å°æ²¡åæ³ç´æ¥ä»å®ç½ä¸è½½äºè¿å¶å®è£ å æ¥å®è£ ï¼å¥½å¨Golangæ¯æ¯æå¤å¹³å°å¹¶ä¸å¼æºçè¯è¨ï¼å æ¤å¯ä»¥éè¿ç´æ¥å¨ARMå¹³å°ä¸ç¼è¯æºä»£ç æ¥å®è£ ãæ´ä¸ªè¿ç¨ä¸»è¦å æ¬ç¼è¯å·¥å ·é ç½®ãè·åGolangæºä»£ç ã设置Golangç¼è¯ç¯å¢åéãç¼è¯ãé ç½®Golangè¡ç¯å¢åéçæ¥éª¤ã
注ï¼æ¬æéç¨æ èæ´¾åæµè¯ï¼å 为æ èæ´¾æ¯åºäºARMå¹³å°çã
1ãç¼è¯å·¥å ·é ç½®
æ®è¯´ä¸ä¸ªçæ¬çgolangç¼è¯å·¥å ·è¦ä½¿ç¨golangèªå·±æ¥åï¼ä½ç®åè¿æ¯ä½¿ç¨Cç¼è¯å·¥å ·çãå æ¤ï¼é¦å è¦é 置好Cç¼è¯å·¥å ·ï¼
1.1å¨UbuntuæDebianå¹³å°ä¸å¯ä»¥ä½¿ç¨sudoapt-getinstallgcclibc6-devå½ä»¤å®è£ ï¼æ èæ´¾çRaspBianç³»ç»æ¯åºäºDebianä¿®æ¹çï¼æ以å¯ä»¥ä½¿ç¨è¿ç§æ¹æ³å®è£ ã
1.2å¨RedHatæCentOS6å¹³å°ä¸å¯ä»¥ä½¿ç¨sudoyuminstallgcclibc-develå½ä»¤å®è£ ã
å®è£ å®æåå¯ä»¥è¾å ¥gcc--versionå½ä»¤éªè¯æ¯å¦æåå®è£ ã
2ãè·ågolangæºä»£ç
2.1ç´æ¥ä»å®ç½ä¸è½½æºä»£ç å缩å ã
golangå®ç½æä¾golangçæºä»£ç å缩å ï¼å¯ä»¥ç´æ¥ä¸è½½ï¼ææ°ç1.4.1çæ¬æºä»£ç é¾æ¥ï¼/golang/go1.4.1.src.tar.gz
2.2使ç¨gitå·¥å ·è·åã
golang使ç¨gitçæ¬ç®¡çå·¥å ·ï¼ä¹å¯ä»¥ä½¿ç¨gitè·ågolangæºä»£ç ãæ¨è使ç¨è¿ä¸ªæ¹æ³ï¼å 为以åå¯ä»¥éæ¶è·åææ°çgolangæºä»£ç ã
2.2.1é¦å 确认ARMå¹³å°ä¸å·²ç»å®è£ äºgitå·¥å ·ï¼å¯ä»¥ä½¿ç¨git--versionå½ä»¤ç¡®è®¤ãä¸è¬linuxå¹³å°é½å®è£ äºgitï¼æ²¡æçè¯å¯ä»¥èªè¡å®è£ ï¼ä¸åå¹³å°çå®è£ æ¹æ³å¯ä»¥åèï¼/download/linux
2.2.2å éè¿ç¨golangçgitä»åºå°æ¬å°
å¨ç»ç«¯cdå°ä½ æ³è¦å®è£ golangçç®å½ï¼ç¡®ä¿è¯¥ç®å½ä¸æ²¡æå为goçç®å½ãç¶å以ä¸å½ä»¤è·å代ç ä»åºï¼
gitclone/go
大éå°åºå¯è½ä¼è·å失败ï¼å¨ä¸ç¿»å¢çæ åµä¸æè¯äºå 次é½æ²¡æåï¼åå 大家é½æçã好å¨googleå·²ç»å°golangä¹æ管å°githubä¸é¢ï¼æ以ä¹å¯ä»¥éè¿ä¸é¢å½ä»¤è·åï¼
gitclone/golang/go.git
è§ç½ç»æ åµï¼ä¸è½½å¯è½éè¦ä¸å°æ¶é´ãæ2Mç带宽è±äºå°è¿ä¸¤ä¸ªå°æ¶æä¸è½½å®ï¼è½ç¶æ´ä¸ªé¡¹ç®ä¸è¿å åå ==
ä¸è½½å®æåï¼å¯ä»¥çå°ç®å½ä¸å¤äºä¸ä¸ªgoç®å½ï¼éé¢å³ä¸ºgolangçæºä»£ç ï¼å¨ç»ç«¯ä¸æ§è¡cdgoå½ä»¤è¿å ¥è¯¥ç®å½ã
æ§è¡ä¸é¢å½ä»¤æ£åºgo1.4.1çæ¬çæºä»£ç ï¼å 为ç°å¨å·²ç»ææ°ç代ç æ交ä¸å»äºï¼ææ°ç代ç å¯è½ä¸æ¯æ稳å®çï¼
gitcheckoutgo1.4.1
è³æ¤ï¼ææ°1.4.1åè¡ççæºä»£ç è·åå®æ¯
3ã设置golangçç¼è¯ç¯å¢åé
主è¦æGOROOTãGOOSãGOARCHãGOARMå个ç¯å¢åééè¦è®¾ç½®ï¼å 解éå个ç¯å¢åéçæä¹ã
3.1GOROOT
主è¦ä»£è¡¨golangæ ç»æç®å½çè·¯å¾ï¼ä¹å°±æ¯ä¸é¢gitæ£åºçgoç®å½ãä¸è¬å¯ä»¥ä¸ç¨è®¾ç½®è¿ä¸ªç¯å¢åéï¼å 为ç¼è¯çæ¶åé»è®¤ä¼ä»¥goç®å½ä¸srcåç®å½ä¸çall.bashèæ¬è¿è¡æ¶çç¶ç®å½ä½ä¸ºGOROOTçå¼ã为äºä¿é©èµ·è§ï¼å¯ä»¥ç´æ¥è®¾ç½®ä¸ºgoç®å½çè·¯å¾ã
3.2GOOSåGOARCH
åå«ä»£è¡¨ç¼è¯çç®æ ç³»ç»åå¹³å°ï¼å¯éå¼å¦ä¸ï¼
GOOSGOARCH
darwin
darwinamd
dragonfly
dragonflyamd
freebsd
freebsdamd
freebsdarm
linux
linuxamd
linuxarm
netbsd
netbsdamd
netbsdarm
openbsd
openbsdamd
plan
plan9amd
solarisamd
windows
windowsamd
éè¦æ³¨æçæ¯è¿ä¸¤ä¸ªå¼ä»£è¡¨çæ¯ç®æ ç³»ç»åå¹³å°ï¼èä¸æ¯ç¼è¯æºä»£ç çç³»ç»åå¹³å°ãæ èæ´¾çRaspBianæ¯linuxç³»ç»ï¼æ以è¿äºGOOS设置为linuxï¼GOARCH设置为armã
3.3GOARM
表示使ç¨çæµ®ç¹è¿ç®åå¤çå¨çæ¬å·ï¼åªå¯¹armå¹³å°æç¨ï¼å¯éå¼æ5ï¼6ï¼7ãå¦ææ¯å¨ç®æ å¹³å°ä¸ç¼è¯æºä»£ç ï¼è¿ä¸ªå¼å¯ä»¥ä¸è®¾ç½®ï¼å®ä¼èªå¨å¤æéè¦ä½¿ç¨åªä¸ä¸ªçæ¬ã
æ»ç»ä¸æ¥ï¼å¨æ èæ´¾ä¸è®¾ç½®golangçç¼è¯ç¯å¢åéï¼å¯ç¼è¾$HOME/.bashrcæ件ï¼å¨æ«å°¾æ·»å ä¸é¢å 容ï¼
exportGOROOT=ä½ çgoç®å½è·¯å¾
exportGOOS=linux
exportGOARCH=arm
ç¼è¾å®åä¿åï¼æ§è¡source~/.bashrcå½ä»¤è®©ä¿®æ¹çæã
4ãç¼è¯æºä»£ç
ç¯å¢åéé ç½®å®æèªåå°±å¯ä»¥å¼å§ç¼è¯æºä»£ç ãå¨goç®å½ä¸çsrcåç®å½ä¸ï¼ä¸»è¦æall.bashåmake.bash两个èæ¬ï¼å¦å¤è¿æ两个all.batåmake.batèæ¬éç¨äºwindowå¹³å°ï¼ãç¼è¯å®é ä¸å°±æ¯æ§è¡å ¶ä¸ä¸ä¸ªèæ¬ï¼ä¸¤è çåºå«å¨äºall.bashå¨ç¼è¯å®æåè¿ä¼æ§è¡ä¸äºæµè¯å¥ä»¶ãå¦æå¸æåªç¼è¯ä¸æµè¯ï¼å¯ä»¥è¿è¡make.bashèæ¬ã使ç¨cdå½ä»¤è¿å ¥goä¸srcç®å½ï¼æ§è¡./all.bashæè ./make.bashå½ä»¤å³å¯å¼å§ç¼è¯ãç±äºç¡¬ä»¶æ åµä¸åï¼ç¼è¯èè´¹çæ¶é´ä¸åãå¨æçBåæ èæ´¾ç¼è¯è¿ç¨è±è´¹äºå°è¿å个å°æ¶ï¼ç¼è¯å®æåæ§è¡çæµè¯å¥ä»¶åè±è´¹äºå·®ä¸å¤ä¸ä¸ªå°æ¶ï¼æ»å ±è±è´¹äºä¸ä¸ªåå°æ¶å·¦å³ã
5ãé ç½®golangè¿è¡ç¯å¢åé
ç¼è¯å®æåï¼goç®å½ä¸ä¼çæbinç®å½ï¼éé¢å°±æ¯goçè¿è¡èæ¬ã为äºä»¥å使ç¨æ¹æ³ï¼å¯ä»¥å°è¿ä¸ªbinè·¯å¾æ·»å å°PATHç¯å¢åéä¸ãåæ ·ç¼è¾~/.bashrcæ件ï¼å 为åé¢è®¾ç½®è¿GOROOTç¯å¢åéæågoç®å½äºï¼æ以åªéè¦å¨æ«å°¾å ä¸
exportPATH=$PATH:$GOROOT/bin
ä¿åååæ ·æ§è¡source~/.bashrcå½ä»¤è®©ç¯å¢åéçæã
è³æ¤ï¼golangæºä»£ç ç¼è¯å®è£ æåãæ§è¡goversionåºè¯¥å°±è½çå°å½ågolangççæ¬ä¿¡æ¯ï¼è¡¨ç¤ºç¼è¯å®è£ æåã
linuxä¸ARMå¹³å°ç¼è¯ç¼åçå®æç¨åºå¦ä½å¨windowsç¯å¢ä¸è¿è¡ï¼
ç´æ¥å¨windowä¸è¿è¡ä¸äºãåªè½å¨windowä¸å®è£ èææºï¼åå®è£ linuxç³»ç»ï¼å¨èææºä¸çlinuxégccç¼è¯ä½ çç¨åº.
请é®å¦ä¹ ARMåµå ¥å¼å¼ååºè¯¥åå¤äºä»ä¹å¼åå·¥å ·åè¦æ±ï¼
æ请ã
è¿ä¸ªé®é¢ç¸ä¿¡æ¯å°æ°ææåµå ¥å¼åå¦è çé¾é¢ï¼
ä¸é¢è¯¾å 容æ¯åµå ¥å¼å¦ä¹ å¿ å¦çï¼Cè¯è¨;C++;æä½ç³»ç»;计ç®æºç»æåç;linuxç¼ç¨;åçæº;arm;硬件ç¼ç¨è¯è¨(FPGA);模æçµè·¯æ°åçµè·¯ã
1ãcc++è¯è¨ï¼è¿æ¯è®¡ç®æºè¡ä¸çå¿ ä¿®è¯¾ï¼å¿ é¡»æ¾æå®å®å¦å¥½ï¼å¯ä»¥å®è£ turbocç¼è¯å¨ä¸ºå¼åç¯å¢ï¼èç³»Cè¯è¨ç¼ç¨;å®è£ vc++6.0å¦ä¹ C++ç¼ç¨ã
2ãæä½ç³»ç»ï¼å å¨çµèä¸å®è£ ä¸ä¸ªvmwareworkstationï¼ç¶åå¨vmwareworkstationéå®è£ ä¸ä¸ªlinux(redhatä¼ä¸ç)èææºãå¦ä¹ ä¸ä¸æä½ç³»ç»çåºæ¬åçï¼çælinuxç¯å¢ä¸çå¼åç¯å¢ï¼ç¶åä½ å°±å¯ä»¥ç §çãèªå·±å¨æåæä½ç³»ç»ãå个æä½ç³»ç»è¯è¯ã
3ã计ç®æºç»æåçï¼çæ计ç®æºçåºæ¬åçï¼ççä¸ä¸ªè®¡ç®æºçåºæ¬ç»æå软件å¨éé¢æ¯å¦ä½è·çã
4ããunix/linuxç¼ç¨å®è·µæç¨ãå¯ä»¥è¯´æ¯linuxç¼ç¨çå¿ ä¿®è¯¾ï¼å¾ä¸éçä¸æ¬ä¹¦ï¼åå¦åµå ¥å¼çæåå¯ä»¥ççã
5ãåçæºï¼å ¶å®å°±æ¯ä¸å°çµèï¼åç°å¨ç汽车æ§å¶ãledæ§å¶ãå±å¹äº®å ç¨åº¦æ§å¶ï¼å®é½å¯ä»¥å®ç°ï¼èªå·±ä¹°åå¼åæ¿å¼ä¸ä¸ï¼ä½ è½å¦å°å¾å¤çå«äººå¦ä¸å°çã
6ãarmï¼ç°å¨æµè¡çå¾®æºï¼è¯´ç½äºå°±æ¯ä½çåçæºï¼è¿å¯ä»¥è·æä½ç³»ç»å¦ï¼èªå·±æ³åæ³ç§»æ¤ä¸ä¸ªæä½ç³»ç»ä¸å»å§
7ã硬件ç¼ç¨è¯è¨(FPGA)ï¼è¯çå°åºæ¯æä¹åæçï¼å¦ä¹ è¿é¨è¯¾ï¼ä½ å°±ç¥éäº
8ã模æçµè·¯æ°åçµè·¯ï¼ç¡¬ä»¶çåºç¡ï¼å¦æå¯ä»¥çè¯ï¼å¦ä¹ ä¸protelï¼èªå·±å个硬件pcbæ¿è¯è¯ã
计ç®æºè¿è¡é½æ¯ååäºå®è·µç课ç¨ï¼æ以è¦æ³¨éå¨æè½åï¼
å¦ä¹ åµå ¥å¼è¿åºæ¬è¯¾ç¨çæ¶åï¼ä½ å¯ä»¥æç §è¿æ ·ç顺åºæ¥å¦ä¹ ï¼
1ï¼Cè¯è¨ã计ç®æºç»æåçã模æçµè·¯æ°åçµè·¯
2ï¼æ±ç¼è¯è¨ãåçæºãæä½ç³»ç»ãC++
3ï¼ç¡¬ä»¶ç¼ç¨è¯è¨ãarm
åµå ¥å¼å¼å大æµåå个æ¹åï¼ç¡¬ä»¶ã驱å¨ãå æ ¸ãåºç¨ï¼å¦ææ¯å¸æååµå ¥å¼è½¯ä»¶æ¹ååå±çè¯ï¼ç®å常è§çæ¯
åµå ¥å¼Linux+ARMæ¹åï¼å ³äºè¿ä¸ªæ¹åï¼å¤§æ¦å3个é¶æ®µï¼
1ãåµå ¥å¼linuxä¸å±åºç¨ï¼å æ¬QTçGUIå¼å
2ãåµå ¥å¼linuxç³»ç»å¼å
3ãåµå ¥å¼linux驱å¨å¼ååµå ¥å¼ç®å主è¦é¢åçå 个æä½ç³»ç»æ¯ï¼LINUXï¼WINCEãVxWorksççLinuxæ¯å¼æºå è´¹çï¼èä¸å ¶æºä»£ç æ¯å¼æ¾çï¼æ´å éåæ们å¦ä¹ åµå ¥å¼ã
èªå¦çè¯ä½ å¯ä»¥å°è¯ä»¥ä¸è·¯çº¿ï¼
(1)Cè¯è¨æ¯ææç¼ç¨è¯è¨ä¸ç强è ï¼åçæºãDSPã类似ARMçç§ç§è¯ççç¼ç¨é½å¯ä»¥ç¨Cè¯è¨æå®)ï¼å æ¤å¿ é¡»é常çç»çææ¡ãæ¨è书ç±ï¼è°æµ©å¼ºçå¾ä¸éï¼ãTheCProgrammingLanguageãè¿æ¬ç»å ¸çæææ¯èå¤åçï¼ä¹æä¸è¯çæ¬ã
(2)æä½ç³»ç»åçï¼æ¯å¿ éçï¼å¦æä½ æ¯è®¡ç®æºä¸ä¸æ¯ä¸é£ä¹å°±æ æè°äºï¼å¦ææ¯é计ç®æºä¸ä¸çå°±å¿ é¡»æ¾ä¸æ¬æ¯è¾æµ æ¾ç计ç®æºåç书ç±çä¸çï¼æå¥å«âè¿ç¨ââ线ç¨ââç³»ç»è°åº¦âççåºæ¬é®é¢ææ¸ æ¥ã
(3)Linuxæä½ç³»ç»å°±æ¯ç¨Cè¯è¨ç¼åçï¼æä»¥ä½ ä¹åºè¯¥å å¦ä¹ ä¸Linuxæ¹é¢çç¼ç¨ï¼åªæä½ ä¼åºç¨äºï¼æè½è¿ä¸æ¥å»äºè§£å ¶å æ ¸çç²¾é«ãæ¨è书ç±ï¼ãUNIXç¯å¢é«çº§ç¼ç¨ã(第2ç)
(4)äºè§£ARMçæ¶æï¼åçï¼ä»¥åå ¶æ±ç¼æ令ï¼æ们å¨åµå ¥å¼å¼åä¸ï¼ä¸è¬å¾å°å»åæ±ç¼ï¼ä½æ¯èµ·ç çè¦æ±æ¯è½å¤çæarmæ±ç¼ã
(5)ç³»ç»ç§»æ¤çæ¶åï¼å°±éè¦ä½ ä»ä¸å±çbootloaderå¼å§ï¼ç¶åå æ ¸ç§»æ¤ï¼æ件系ç»ç§»æ¤çãè移æ¤è¿é¨å对硬件çä¾èµæ¯é常大çï¼å ¶é ç½®æ¥éª¤ä¹ç¸å¯¹å¤æï¼ä¹æ²¡æ太å¤è¯¦ç»èµæã
(6)驱å¨å¼ålinux驱å¨ç¨åºè®¾è®¡æ¢æ¯ä¸ªæå¯ææææ§çé¢åï¼åæ¯ä¸ä¸ªå大精深çå 容ãlinux驱å¨ç¨åºè®¾è®¡æ¬è´¨æ¯å±äºlinuxå æ ¸ç¼ç¨èç´çï¼å èæ¯å¯¹linuxå æ ¸åå æ ¸ç¼ç¨æ¯æè¦æ±çãå¨å¦ä¹ åä½ è¦æ³äºè§£linuxå æ ¸çç»æï¼å 为æ¯ä¸é¨åè¦è¯¦ç»ç 究çè¯è¶³å¤å¯ä»¥æ©å±æä¸æ¬å书ã
ç»å¤§å®¶æä¸ä¸ªåµå ¥å¼å¼åå¦ä¹ 大æ¹é¢çå¦ä¹ æ¡æ¶æåºæ¥äº
ãæåå¢ç¥å¤§å®¶è½å¤å¨å¦ä¹ çè·¯ä¸é©¬å°æåã
åºç§è½¦è®¡ä»·å¨
ä¸ãé¢ç®ï¼Aé¢ è®¾è®¡å¹¶å¶ä½ä¸ä¸ªç¨äºåºç§è½¦ç计费系ç»ã
äºã设计è¦æ±
1ãåºæ¬è¦æ±ï¼
ï¼1ï¼å¶ä½ä¸ä¸ªæ¨¡æ车轮ç¨ç´æµçµå¨æºï¼ææ¥è¿çµæºï¼é©±å¨ï¼ç°åºæ¨¡æ以ä¸è¿è¡æ åµçæ¶è´¹æ åµï¼
u å设车轮çå¨é¿ä¸ºä¸ç±³ã
u èµ·æ¥ä»·ä¸ºä¸å ¬éäºå ï¼ç½å¤©æ¯å ¬éä¸å ï¼æä¸æ¯å ¬éåå ã
u è¿è¡äºå ¬éä¹åï¼åä¸åéï¼åè¿è¡äºå ¬éä¹åä¹å®¢ä¸è½¦ï¼ç±äºæ¼ç¤ºçæ¶é´çéè¦ï¼éä¸åè½¦è¶ è¿ä¸åéå¼å§æ¶è´¹ï¼è¶ è¿çæ¶é´æ¯åéä¸å ã
ï¼2ï¼è½å¤æå¨ä¿®æ¹åä»·ã
ï¼3ï¼å ·ææ°æ®çå¤ä½åè½ã
ï¼5ï¼æ°æ®è¾åº
u åä»·è¾åº è³å°2ä½
u è·¯ç¨è¾åº è³å°2ä½
u æ»éé¢è¾åº è³å°3ä½
2ãåæ¥é¨åï¼
ï¼1ï¼è½å¤å¨æçµçæ åµä¸åå¨åä»·çæ°æ®ã
ï¼2ï¼è½å¤æ¾ç¤ºãè°èå½åçç³»ç»æ¶é´ï¼å¹¶æ ¹æ®å½åçç³»ç»æ¶é´è¿è¡è®¡è´¹ï¼6æ¶è³æ¶ä¸ºç½å¤©ï¼æ¶è³ç¬¬äºå¤©6æ¶ä¸ºæä¸ï¼ã
ï¼3ï¼æè¯é³æ¥ä»·åè½ã
1.2 æ¹æ¡æ¯è¾ä¸è®ºè¯
1.2.1æ§å¶å¨æ¨¡å
æ¹æ¡ä¸ï¼éç¨å¯ç¼ç¨é»è¾å¨ä»¶CPLD ä½ä¸ºæ§å¶å¨ãCPLDå¯ä»¥å®ç°åç§å¤æçé»è¾åè½ãè§æ¨¡å¤§ãå¯åº¦é«ãä½ç§¯å°ã稳å®æ§é«ãIOèµæºä¸°å¯ãæäºè¿è¡åè½æ©å±ãéç¨å¹¶è¡çè¾å ¥è¾åºæ¹å¼ï¼æé«äºç³»ç»çå¤çé度ï¼éåä½ä¸ºå¤§è§æ¨¡æ§å¶ç³»ç»çæ§å¶æ ¸å¿ãä½æ¬ç³»ç»ä¸éè¦å¤æçé»è¾åè½ï¼å¯¹æ°æ®çå¤çé度çè¦æ±ä¹ä¸æ¯é常é«ãä¸ä»ä½¿ç¨åç»æµçè§åº¦èèæ们æ¾å¼äºæ¤æ¹æ¡ã
æ¹æ¡äºï¼éç¨åé³å ¬å¸çä½åçæºï¼å®æ¯ä½æ§å¶å¨ï¼å ·æä½ç§¯å°ã驱å¨è½åé«ãéæ度é«ãææ©å±ãå¯é æ§é«ãåèä½ãç»æç®åãä¸æå¤çè½å强çç¹ç¹ãå¤çé度é«ï¼å°¤å ¶éç¨äºè¯é³å¤çåè¯å«çé¢åï¼éç¨æ¤åçæºè½å¤å¾æ¹ä¾¿çå®ç°åæ¥é¨åçè¯é³æ¥ä»·åè½ï¼ä½æ¤åçæºè¾é¾ä¹°å°ï¼èä¸ä»·æ ¼ç¨è´µï¼æ æ¾å¼äºæ¤æ¹æ¡ã
æ¹æ¡ä¸ï¼éç¨Atmelå ¬å¸çATSåçæºä½ä¸ºä¸»æ§å¶å¨ï¼æ¤åçæºæ¯å æ ¸çCMOS 8ä½åçæºï¼çå å«8k空é´çå¯åå¤æ¦äºæ¬¡çFlash读ååå¨å¨ï¼å ·æ bytesçéæºååæ°æ®åå¨å¨ï¼RAMï¼ï¼ä¸ªIOå£ï¼ä½ ç¥éåæ¿è£ ä¿®ååæ ·æ¿ã2个ä½å¯ç¼ç¨å®æ¶è®¡æ°å¨ãå ¶ä»·æ ¼ä½å»ï¼é常éåç¨äºå°ç³»ç»çå¼åï¼å¼éç¨ISPå¨çº¿ç¼ç¨ï¼ç¨åºçä¸è½½åä¿®æ¹ä¹å¾æ¹ä¾¿ãé¢ç®æè¦æ±çç³»ç»å¯¹æ§å¶å¨çè¦æ±ä¸é«ï¼æ们综åå¤æ¹é¢èèéç¨äºæ¤æ¹æ¡ã
1.2.2车轮转éæ¢æµæ¨¡å
æ¹æ¡ä¸ï¼ç¨å æçµé»ç»æå ææ¢æµå¨ãå æçµé»çé»å¼å¯ä»¥è·éå¨å´ç¯å¢å 线çååèååãå½å çº¿ç §å°å°è½¦è½®ç ççç½è²é¨åæ¶ï¼å 线åå°å¼ºçï¼å çº¿ç §å°å°è½¦è½®ç ççé»è²é¨åæ¶ï¼å 线åå°è¾å¼±ãå æ¤å æçµé»å¨ç½è²é¨ååé»è²é¨åä¸æ¹æ¶ï¼é»å¼ä¼åçææ¾çååãå°é»å¼çååå¼ç»è¿æ¯è¾å¨å°±å¯ä»¥è¾åºé«ä½çµå¹³ãæ¤æ¹æ¡æåå¤çå 线çå¹²æ°ã
æ¹æ¡äºï¼éç¨éå°ä¼ æå¨æ为æ¢æµå¨ä»¶ï¼éå°ä¼ æå¨ç两é¨ååå«å®è£ å¨è½¦è½®ååºå®çµè·¯æ¿ä¸ï¼æ ¹æ®è½¦è½®è½¬å¨æ¶å°ååçç£åºå¼ºåº¦è½¬æ¢ä¸ºèå²çµä¿¡å·ï¼æ¤æ¹æ¡è½å¤ä½¿å¯¹è½¦è½®è®¡æ°ç²¾ç¡®ï¼å·¥ä½ç¨³å®ï¼ä½ææ¬è¾é«ã
æ¹æ¡ä¸ï¼éç¨çº¢å¤å¯¹ç®¡ï¼å½çº¢å¤åå°ç®¡åå°åºç红å¤çº¿ç §å°ç ççç½è²é¨ååé»è²é¨åæ¶ï¼å ¶åå°ç红å¤çº¿å¼ºåº¦ä¸åï¼éè¿çº¢å¤æ¥æ¶ç®¡æ¥æ¶åç»çµåæ¯è¾å¨LMæ¯è¾åå³å¯è¾åºé«ä½çµå¹³ãæ¤æ¹æ¡ææ¬ä½ï¼å®¹æå®ç°ï¼ä¸çµæ度è¾é«ã
æ ¹æ®æ¬ç³»ç»ç设计è¦æ±ï¼å¯¹è½¦è½®è½¬éçæ¢æµåå¤ççå¹²æ°è¾å°ï¼èéç¨éç¨çº¢å¤å¯¹ç®¡å·¥ä½çµè·¯ç®åï¼è°è¯æ¹ä¾¿ï¼æ以æ们éæ©æ¤æ¹æ¡ã
1.2.3æ¶éæ§å¶æ¨¡å
æ¹æ¡ä¸ï¼éç¨.MHzçæ¶æ¯äº§çéè¡åç»å¤ä¸ªLSè¿è¡æ¬¡2åé¢ï¼äº§ç精确çç§ä¿¡å·ï¼èªè¡æ建æ¶é´çµè·¯ãæ¤æ¹æ¡å ·æè¾å¥½çååæ§ï¼ä½çµè·¯æ建起æ¥è¾ä¸ºå¤æï¼å·¥ä½ä¸å¤ç¨³å®ï¼ä¹ä¸æ¹ä¾¿è°èã
æ¹æ¡äºï¼ç´æ¥éç¨åçæºå é¨çæ¶éä¿¡å·ãè¿æ ·è½å¤å¤§å¤§ç®å硬件ç设计ï¼ä½æçµåä¸è½å·¥ä½ï¼èä¸å¤§éå ç¨åçæºæéçå åèµæºã
æ¹æ¡ä¸ï¼éç¨DSä¸ç¨æ¶éè¯çãDSæ¯åè½å¼ºå¤§çå®æ¶æ¶éè¯çï¼å ç½®éçµæ± ï¼å ç½®æ¶æ¯ãæä¾äºè¿å¶æ°åBCDç 两ç§æ°æ®è¡¨ç¤ºæ¹å¼ãå¯åæ¢å°æ¶å¶åå°æ¶å¶æ¶é´è¡¨ç¤ºãå ·æé¹éåè½ãå¯ç¼ç¨æ¹æ³¢è¾åºãæä¾åèéæ失åå¨ç©ºé´ï¼ç¨äºæçµä¿åæ°æ®ã
ç±äºæ¬ç³»ç»çå¾å¤åè½é½æ¯åºäºæ¶é´çåºç¡ä¸å®ç°çï¼å æ¤å¯¹æ¶éçè¦æ±è¾é«ï¼æ æ们éæ©æ¹æ¡ä¸ã
1.2.4æ¾ç¤ºæ¨¡å
æ¹æ¡ä¸ï¼ç¨æ°ç 管è¿è¡æ¾ç¤ºãæ°ç 管ç±äºæ¾ç¤ºé度快ï¼ä½¿ç¨ç®åï¼æ¾ç¤ºææç®æ´æäºèå¾å°äºå¹¿æ³åºç¨ï¼ä½æ¾ç¤ºçå å®¹ä» ä» å±éäºæ°åï¼äººæºçé¢ä¸å¤å好å æ¤æ们æ¾å¼äºæ¤æ¹æ¡ã
æ¹æ¡äºï¼ç¨LCD液æ¶è¿è¡æ¾ç¤ºãLCDç±äºå ¶æ¾ç¤ºæ¸ æ°ï¼æ¾ç¤ºå 容丰å¯ãæ¸ æ°ï¼æ¾ç¤ºä¿¡æ¯é大ï¼ä½¿ç¨æ¹ä¾¿ï¼æ¾ç¤ºå¿«éèå¾å°äºå¹¿æ³çåºç¨ãç±äºæ¬æ¤ç³»ç»éè¦æ¾ç¤ºçå 容è¾å¤ï¼ä¸ºè¾¾å°è¾å¥½ç人æºäº¤äºçé¢ï¼æ们éæ©äºæ¤æ¹æ¡ã
1.3æç»éæ©æ¹æ¡
u éç¨ATSåçæºä½ä¸ºä¸»æ§å¶å¨ã
u éç¨çº¢å¤å¯¹ç®¡+LMä½ä¸ºè½¦è½®è½¬éæ¢æµæ¨¡åã
u éç¨DSä½ä¸ºå®æ¶æ¶éæ§å¶è¯çã
u éç¨LCD液æ¶ä½ä¸ºæ¾ç¤ºæ¨¡åã
u éç¨æ®éçç´æµçµæºåèªå¶ç车轮åç çä½ä¸ºæ¨¡æ车轮ã
1.4ç³»ç»ç»æå¾
æé®ï¼
红å¤æåºæ¨¡å
MCU
ATS
DSç³»ç»æ¶é´ï¼æçµä¿åæ°æ®
LCD液æ¶æ¾ç¤º
模æ车轮
å¾1 ç³»ç»ç»ææ¡æ¶
第äºç« :åé¨åçµè·¯åçä¸è®¾è®¡
2.1åçæºä¸»æ§æ¨¡åç设计
Atmelå ¬å¸çATSæ¯å æ ¸çåçæºãä¸ç¨ç§åå¨èåªç¨ä¸²å£æè 并å£å°±å¯ä»¥å¾åçæºä¸ä¸è½½ç¨åºã
æ们æ设计çåçæºæå°ç³»ç»æ¿éç¨çåé¾å ¬å¸ç并å£ä¸è½½æ åï¼ä¸å¨æ¿ä¸çæä¸è½½çº¿æ座ï¼è¿æ ·å¯ä»¥é常æ¹ä¾¿çå®ç°éè¿PCæºç并å£å¾åçæºä¸ä¸è½½ç¨åºãåæ¶å°ç¨³åçµæºé¨åä¹éå¨å ¶ä¸ï¼ç»è¿ç¨³ååç+5Vçµæºä¸ºé¤çµæºå¤çå ¶ä»ç³»ç»æ¨¡åæä¾å·¥ä½çµæºã
åçæºæ§å¶æ¨¡åç示æå¾å¦å¾9æ示ï¼
å¾2 åçæºä¸»æ§æ¨¡å
åçæºçI/Oå£åé å¦ä¸ï¼
P0,P2.5~P2.7 LCD模å
P1,P2.0~P2.3,P3.3 å®æ¶æ¶é模å
P3.0~P3.1,P3.5~P3.7 æé®å¼å ³
P3.2 红å¤æ¢æµæ¨¡å
2.2红å¤æ¢æµæ¨¡åç设计
æ们éè¿å°çº¢å¤æ¥æ¶äºæ管çä¸ååéä¸åºåçµåéå ¥çµåæ¯è¾å¨LMè¿è¡æ¯è¾ï¼è¾åºå¯¹åºçé«ä½çµå¹³ä¿¡å·ï¼éå°åçæºè¿è¡å¤çãå ¶çµè·¯åçå¾å¦ä¸ï¼
å¾3 红å¤æ¢æµæ¨¡å
å¨å¾3ä¸ï¼å¯è°çµé»RWå¯ä»¥è°èæ¯è¾å¨çé¨éçµåï¼ç»ç¤ºæ³¢å¨è§å¯ï¼è¾åºæ³¢å½¢ç¸å½è§åï¼å¯ä»¥ç´æ¥å¤åçæºæ¥è¯¢ä½¿ç¨ã
ç±äºæ们çç çéç¨äºåæ³è¿è¡è®¾è®¡ï¼é»ç½ä¸¤ç§é¢è²åå åå¨çä¸åï¼å æ¤åçæºæ¯æ¥æ¶å°ä¸ä¸ªé«çµå¹³ä¿¡å·å模æ车轮转äºä¸åï¼éè¿è®¡ç®æ¯ç§éåçæºæ¥æ¶å°çé«çµå¹³ä¿¡å·ä¸ªæ°å³å¯æ¹ä¾¿ç计ç®åºè½¦è½®çé度åæèµ°çéç¨ã
2.3模æ车轮ç设计
å°è½¦çé度åéç¨çæµéæ¯éè¿å çµå¯¹ç®¡æ£æµç çå®ç°çãæ们éç¨æ®éçç´æµçµæºåç©å ·è½¦ç车轮ï¼èªå¶ç çï¼åæ模æ车轮ï¼ä¾æµéç¨ã
èèå°çµæºè¿è¡æ¶å¯¹çµåçå¹²æ°ï¼çµæºççµæºç´æ¥ç±è¾å ¥çæªç»è¿ç¨³åççµæºæä¾ï¼è¯ç¨æ解é¤å³å¨ååã并设ç«ç¬ç«çå¼å ³ï¼æ人工æ§å¶ï¼è¿æ ·æ´ç¬¦åå®é çå·¥ä½æ åµã
为é²æ¢å çµç®¡äº§ç误å¨ä½ï¼æ们å°å çµç çå为2份é»ç½ç¸é´çåçï¼æ¯ä»½åå åå¨çä¸åï¼å¦å¾4ï¼
å¾4 模æ车轮ç ç
å°å ¶ç´§è´´å¨è½¦è½®çå 侧ãå¨å°è£ çå³ä¾§æä¸ä¸ªæ¹åï¼çº¢å¤å¯¹ç®¡éè¿æ¹å对å çµç çè¿è¡æ£æµå°±å¯ä»¥å¾å°è½¦è½®è½¬è¿çåæ°ãä»è计ç®åºå°è½¦åè¿çè·¯ç¨ã
æ¬ç³»ç»å设车轮çå¨é¿ä¸º1ç±³ï¼å设åçæºæ¯ç§æ£æµå°é»ç½ä¿¡å·çåå为nï¼å ±èµ°äºkç§åå°è½¦èµ°è¿çè·¯ç¨ä¸ºSï¼nkç±³ã
2.4å®æ¶æ¶éæ§å¶æ¨¡åç设计
æ们éç¨çDSåè½å¼ºå¤§ï¼å ç½®éçµæ± ï¼å ç½®æ¶æ¯ï¼å¯ä»¥ä½ä¸ºå®æ¶çµåéï¼ä¸ºæ´ä¸ªç³»ç»æä¾æ¶éï¼å¾å¥½å°è§£å³äºé¢ç®åæ¥é¨åâè½å¤æ¾ç¤ºãè°èå½åçç³»ç»æ¶é´ï¼å¹¶æ ¹æ®å½åçç³»ç»æ¶é´è¿è¡è®¡è´¹ï¼6æ¶è³æ¶ä¸ºç½å¤©ï¼æ¶è³ç¬¬äºå¤©6æ¶ä¸ºæä¸ï¼âçè¦æ±ãåæ¶å©ç¨å ¶é¹éåè½å¯¹æ¢æµä¿¡å·è¿è¡éæ ·ï¼ç²¾ç¡®ç计ç®åºè½¦éãç±äºè¯çè¿æä¾åèéæ失åå¨ç©ºé´ï¼å æ¤æ们å°é¢ç®è¦æ±çåç§ä»·æ ¼ç设置æ¹ä¾¿çä¿åå¨éé¢ï¼è¾¾å°æçµä¿åæ°æ®çåè½ã
å¾5 æ¶é模åçµè·¯å¾
2.5人æºäº¤äºçé¢ç设计
为使系ç»ææ´è¯å¥½ç人æºäº¤äºçé¢ï¼æ们å°LCD液æ¶æ¾ç¤ºæ¨¡åï¼æä½æé®ï¼ç³»ç»å¤ä½å¼å ³å车轮æ§å¶å¼å ³éä¸äºå°è£ ççé¢æ¿ä¸ï¼æ¹ä¾¿ç¨æ·æä½ï¼å¦ä¸å¾ï¼
å¾6 人æºäº¤äºçé¢
2.6ç³»ç»æ»ä½çµè·¯å¾
å¾7 ç³»ç»æ»çµè·¯å¾
å¾8 ç³»ç»è£ ç®±åçå é¨å®ç©å¾
第ä¸ç« ï¼ç³»ç»ç¨åºè®¾è®¡
3.1ç³»ç»ç¨åºæå®ç°çåè½
u å®æ¶æ¾ç¤ºæ»éé¢ï¼æ»éç¨ï¼è½¦éï¼å·²èµ°è¿æ¶é´ï¼ç³»ç»æ¶é´ã
u å¯å¨çº¿ä¿®æ¹ç³»ç»æ¶é´ã
u å¯ä¿®æ¹èµ·æ¥ä»·åèµ·æ¥è·ç¦»ã
u å¯ä¿®æ¹æ¯è¶ è¿ä¸å ¬éå æ¶è´¹ç¨ã
u å¯ä¿®æ¹éä¸åè½¦è¶ è¿æ¶é´å¼å§æ¶è´¹çæ¶é´ååä»·ã
3.2ç¨åºä»»å¡åé
表1 ç¨åºä»»å¡åé
å¤é¨ä¸æ0ï¼æ¥èªè½¦è½®ï¼
å¤é¨ä¸æ1ï¼æ¥èªæ¶éï¼
主å½æ°
æ´æ°è·¯ç¨ï¼å æ»ä»·ï¼å¤ä½è®¡æ¶å¨ï¼å¦ææ¾ç¤ºå±ä½¿ç¨æå¨INT0ï¼å°±æ´æ°æ¾ç¤ºã
æ¾ç¤ºå±ä½¿ç¨æç¨screenåé表示ã
计ç®é度ï¼è®¡ç®è¡è½¦æ¶é´ï¼è®¡æ¶å¹¶å¨åè½¦è¶ æ¶åå é±ãæ ¹æ®æ¾ç¤ºå±ä½¿ç¨æå¤ææ¯å¦æ´æ°æ¾ç¤ºã
æ ¹æ®real_timeåéçå¼å³å®æ¯å¦æç³»ç»æ¶é´æ´æ°å°å±å¹ä¸ã
读åæé®ãå³å®æ§å¶é»è¾ã
3.3主ç¨åºæµç¨å¾
å¼å§
åå§åLCDãå®æ¶æ¶é
ä»åå¨å¨è¯»åºåä»·çæ°æ®
æ¾ç¤ºlogo
ä»»æé®
空é²ç¶æï¼æ¾ç¤ºç³»ç»æ¶é´
æé®æä¸
空é²ç¶æ
计费ç¶æ
设置�
N
Y
设置
çå¾ æé®
æ¯2é®?
N
Y
åå§å计费å±å¹ï¼è¿å ¥è®¡è´¹ç¶æ
æ¯3é®
Y
æ¥çç³»ç»æ¶é´ï¼å»¶æ¶4ç§
N
æ¯4é®?
Y
åæ¢è®¡è´¹ï¼è¿å ¥ç©ºé²ç¶æ
N
æä¸2é®å¤ä½
3.4åæ°æ®å¨ä¸åå¨å°å
表2 åæ°æ®å¨ä¸åå¨å°å
å°å
åé
åè½
0x0e
d
//èµ·æ¥ä»· d å ¬é p è§
0x0f
p
0x
day_price
//ç½å¤©æ¯å ¬éä»·æ ¼ï¼åä½ï¼è§
0x
night_price
//å¤ææ¯å ¬éä»·æ ¼ï¼åä½ï¼è§
0x
x
//ä¸éåè½¦è¶ è¿yåéä¹åæxè§æ¯åé计价
0x
y
3.5ä¸ææå¡0ç¨åºæµç¨å¾
触åä¸æ
è·¯ç¨å ä¸ç±³
å 许使ç¨æ¾ç¤ºå±?
计æ¶å¨å¤ä½
è·¯ç¨ï¼ï¼èµ·æ¥è·¯ç¨ï¼
è·¯ç¨>èµ·æ¥è·¯ç¨ï¼
Y
N
Y
æ´æ°è·¯ç¨æ¾ç¤º
åæ»éé¢å ä¸å ¬éä»·
N
æ´æ°æ»éé¢æ¾ç¤º
Y
N
Y
å ¬é计ç¨å¨å¤ä½
ä¸æ2æå¡ç¨åºçtimer_stateåtimer_countåé
counter_åé
å ¬é计ç¨å¨å 1
å ¬é计ç¨å¨ï¼ï¼?
ç»æ
N
Y
åæ»éé¢å ä¸å ¬éä»·
å 许使ç¨æ¾ç¤ºå±?
æ´æ°æ»éé¢æ¾ç¤º
Y
N
å ¬é计ç¨å¨å¤ä½
0å·ä¸ææå¡ç¨åºï¼
车轮转å¨ä¸å触åä¸æ¬¡
3.6 ä¸ææå¡2ç¨åºæµç¨å¾
触åä¸æ
ç³»ç»å¨è®¡è´¹ç¶æï¼
Y
N
éè¦åæ¥æ¶é´ï¼
Y
N
ç»æ
é度=ç°å¨çè·¯ç¨âä¸ç§ä¹åçè·¯ç¨
è¡è½¦æ¶é´å ä¸ç§
计æ¶å¨å ä¸ç§
计æ¶çäºæ大å车æ¶é´ï¼
N
æ»éé¢å æ¯åéä»·
è¿å ¥åè½¦è¶ æ¶ç¶æ
Y
åè½¦è¶ æ¶ç¶æï¼
Y
æ¯åéå é±
N
å°ç³»ç»æ¶é´åæ¥æåæ¥å°å±å¹ä¸
2å·ä¸ææå¡ç¨åºï¼
æ¯ç§é触åä¸æ¬¡
第åç« :ç³»ç»è°è¯ç»æä¸åæ
4.1è°è¯æ¹æ³ä¸ä»ªå¨
表3 æµè¯ä»ªå¨è®¾å¤æ¸ å
仪å¨å称
åå·
ç¨é
æ°é
PCæº
èæ³
è°è¯åä¸è½½ç¨åº
1
æ°åä¸ç¨è¡¨
UNI-TA
æµéåçµè·¯å·¥ä½æ åµ
1
ç§è¡¨
è®°å½æ¶é´
1
ç´æµç¨³åçµæº
ALKIMIA
æä¾çµæº
1
4.2è°è¯æ¥éª¤ä¸æµè¯æ°æ®
4.2.1ç³»ç»æ¶é´ä¸ç§è¡¨å®é æ¶é´æµé
å¼æºåæâå¼å§âé®è¿å ¥è®¡æ¶å·¥ä½ç¶æï¼åæ¶å¯å¨ç§è¡¨è¿è¡åæ¶å¯¹æ¯ï¼åå«å¯¹å·¥ä½æ¶é´ä¸º1åéï¼2åéï¼3åéï¼4åéï¼5åéè¿è¡æµéæ¯è¾ï¼ç»æå¦è¡¨2
表4 ç³»ç»æ¶é´æµè¯æ¯è¾
æµè¯æ¶é´
ç³»ç»æ¾ç¤ºæ¶é´
ç§è¡¨æµéæ¶é´
s
s
.s
s
s
.s
s
s
.s
s
s
.s
s
s
.s
4.2..2车轮转éæµè¯
æ¬ç³»ç»ç设计对æ¢æµä¿¡å·çä¸é沿è¿è¡è§¦åï¼å æ¤å½çº¢å¤å¯¹ç®¡æ¢æµå°çç çä»ç½è²è½¬ä¸ºé»è²æ¶ï¼åçæºä¸æ触åï¼è®¡æ°å¨å ä¸ã
å¯å¨è®¡è´¹ç³»ç»ï¼åæ¶æ工转å¨è½¦è½®ä¸å¨ï¼æ¾ç¤ºå±ä¸è·¯ç¨æ¾ç¤º1mï¼å¨è½¬å¨è½¦è½®å åï¼LCDçæ¾ç¤ºæ°å¼åä¸å®é ç¸ç¬¦ã
4.2.3计费系ç»æµè¯
表5 ä¸åæ åµä¸ç计费ç»ææµè¯
计费æ¶é´æ®µ
è¡é©¶éç¨
è¡é©¶æ¶é´
ä¸éå车æ¶é´
è®¡è´¹ä»·æ ¼
ç½å¤©
m
s
0
5.0å
ç½å¤©
m
s
0
.0å
æä¸
m
s
0
.0å
æä¸
m
s
s
.0å
4.2.4æ°æ®è®¾å®åæçµå¨ååè½
å¨å¾ æºç¶æä¸æâ设置âé®ï¼åå«ä¿®æ¹èµ·æ¥ä»·4kmå 8å ï¼ç½å¤©æ¯å ¬é5å ï¼æä¸æ¯å ¬é7å ï¼ä¿®æ¹ç³»ç»æ¶é´ï¼ç¶åä¿åï¼å ³æºï¼æå¼çµæºï¼çå¾ 5åéä¹åéæ°å¼æºï¼åç°æ°æ®ä¸ºä¿®æ¹åçæ°æ®ï¼å³æ°æ®ç设å®åæçµå¨ååè½ææã
4.3æµè¯ç»æåæ
éè¿è°è¯åç³»ç»æµè¯ï¼åç°ç³»ç»è½å¾å¥½å°å®ç°é¢æçç®çï¼å®ç°äºé¤è¯é³åè½å¤çå ¶ä»ææåè½ï¼å·¥ä½æ§è½ç¨³å®ï¼è®¡è´¹ç²¾ç¡®ãç³»ç»æ¶é´å®æ¶è¿è¡ï¼åç¡®ï¼éç¨çæ¾ç¤ºè¯¯å·®å¨1m以å ãå¾å¥½çå®æäºèµé¢çè¦æ±ã
第äºç« ï¼ç³»ç»æ§è½æ»ç»åç¹ç¹
5.1 å®ç°åºæ¬è¦æ±åè½
表4 åºæ¬åè½çå®ç°æ åµ
åºæ¬è¦æ±åè½
åè½å®ç°æ åµ
åºæ¬è¦æ±ç¬¬ï¼1ï¼é¡¹
å®ç°
åºæ¬è¦æ±ç¬¬ï¼2ï¼é¡¹
å®ç°
åºæ¬è¦æ±ç¬¬ï¼3ï¼é¡¹
å®ç°
åºæ¬è¦æ±ç¬¬ï¼4ï¼é¡¹
å®ç°
åºæ¬è¦æ±ç¬¬ï¼5ï¼é¡¹
å®ç°
5.2 å®ç°åæ¥é¨ååè½
表5 åæ¥åè½çå®ç°æ åµ
åæ¥è¦æ±åè½
åè½å®ç°æ åµ
åæ¥è¦æ±ç¬¬ï¼1ï¼é¡¹
å®ç°
åæ¥è¦æ±ç¬¬ï¼2ï¼é¡¹
å®ç°
åæ¥è¦æ±ç¬¬ï¼3ï¼é¡¹
æªå®ç°
5.3 å¢å çå ¶ä»åè½
u ä¸è®¡è´¹ç³»ç»ç¸å ³çææåæ°ç¨æ·åå¯ä¿®æ¹å¹¶å¨åã
u å ¼æä¸å¹´ååæ°åçµåéåè½ã
u ä¸ä½å人æºäº¤äºçé¢æ§å¶é¢æ¿ï¼ç¡¬ä»¶ç³»è£ ç®±ï¼æé«æºæ¢°å¼ºåº¦ï¼å®å ¨æ§è½åç¾è§åº¦ã
第å ç« ï¼éå½
éå½ä¸ ç³»ç»ç¨åºæºä»£ç
/