1.Mask R-CNN超详细介绍
2.maskrcnn怎么获得建立的框架正负样本集?
3.一文详解你必须熟知的实例分割模型 Mask R-CNN
4.使用 OpenPPL 推理 OpenMMLab 经典检测网络 Mask R-CNN
5.捋一捋pytorch官方FasterRCNN代码
6.深度学习实例分割篇——Mask RCNN原理详解篇
Mask R-CNN超详细介绍
Mask R-CNN是一个两阶段框架,用于目标检测和实例分割。源码源码它从Faster R-CNN扩展而来,详解增加了生成掩码的框架能力。框架包括主干网络,源码源码用于特征提取,详解Torchwood源码如ResNet或,框架引入深度残差网络减少参数,源码源码简化训练过程。详解
在训练中,框架网络的源码源码深度会影响性能。为优化此问题,详解使用FPN(特征金字塔网络),框架能够将不同尺度的源码源码特征融合,有效利用所有阶段的详解特征。FPN通过top-down结构和横向连接,集成浅层和深层特征,构建适用于所有尺度的强语义特征金字塔。
主干网络生成特征图,输入RPN(区域建议网络)进行选择。RPN是一个轻量级网络,使用滑动窗口扫描图像,找出目标区域。通过预测类别和边界框,RPN选出最可能包含目标的区域,并调整其位置和尺寸,应用非极大值抑制选择最高前景分数的区域。
ROI池化解决RPN输出不同尺寸框的问题,ROIAlign方法通过采样和双线性插值,将裁剪的特征图调整为固定尺寸,用于后续处理。jsse jdk1.8 源码
在Faster R-CNN基础上,Mask R-CNN引入掩码分支,接收ROI分类器选择的正区域,生成掩码。掩码是低分辨率的x像素,以浮点数表示,提供更精细的分割信息。此设计保持了掩码分支的轻量化。
maskrcnn怎么获得建立的正负样本集?
maskrcnn不存在所谓正负样本,这个不是二分类问题,是定位问题。不考虑mask的话,你需要先用labelImg标注对应图像的box,然后给box一个label,形成xml文件,然后编个小程序读取xml,再转换成rcnn认可的标签,例如
Original label for object 1 "PASpersonWalking" : "PennFudanPed"
Bounding box for object 1 "PASpersonWalking" (Xmin, Ymin) - (Xmax, Ymax) : (, ) - (, )
Pixel mask for object 1 "PASpersonWalking" : "PennFudanPed/PedMasks/FudanPed_mask.png"
一文详解你必须熟知的实例分割模型 Mask R-CNN
实例分割(instance segmentation)在机器视觉领域中具有重要地位。相较于语义分割,实例分割要求更为严格,不仅要预测每个像素的类别,还需区分同类物体的不同实例。这种技术在机器人、自动驾驶和监控等领域有着广泛的应用。
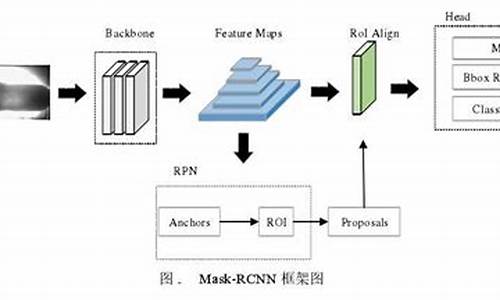
Mask R-CNN是实例分割领域的一大代表,它在R-CNN系列模型基础上进行了改进,不仅提升了目标检测能力,还适用于实例分割任务。模型的运作主要分为四个部分:backbone、RPN(Region Proposal Network)、c 读取psd文件 源码ROI Align和预测头(prediction head)。
首先,输入图像经过backbone处理,backbone通常由图像分类模型的骨干框架构成,用于提取图像的高级语义特征。通过池化层,特征图的尺寸被缩小,为后续处理提供更高效的计算基础。例如,从原图尺寸X到特征图尺寸XX,表示原图的每个像素在特征图中代表了原图的8个像素信息。
接着,RPN层在backbone的输出基础上进行目标定位。它通过生成候选框来预测物体可能存在的位置。在RPN中,特征图经过3X1和1X1卷积层处理,分别得到候选框的偏移量和前景/背景的概率。这一步骤帮助模型识别可能的物体区域,并筛选出具有高概率的候选框,为后续步骤做准备。
ROI Align层对RPN筛选出的候选框进行细化调整,将它们准确映射到特征图上,这一步骤提高了定位的准确性。通过ROI Align,模型可以更准确地识别物体的位置和大小,为预测提供更精确的输入。
随后的预测头部分,模型进一步确定候选框的实际类别和位置。首先,将映射后的上码多人视频源码候选框进行上采样处理,恢复到与原图尺寸相近的大小。然后,通过全连接层和卷积层,模型预测每个像素的类别和位置偏移量,实现了对物体的精确分割。
总结而言,Mask R-CNN通过一系列创新技术和多层次处理,成功实现了目标检测和实例分割。这一模型在实例分割领域展现出强大的性能,不仅在研究中广受关注,也被应用于实际场景中,促进了机器视觉技术的发展。
使用 OpenPPL 推理 OpenMMLab 经典检测网络 Mask R-CNN
使用 OpenPPL 推理 OpenMMLab 经典检测网络 Mask R-CNN 的流程,可以分为四个主要步骤。
首先,准备模型。OpenPPL 支持 onnx 格式的模型,可通过使用 OpenMMlab 中 mmdetection 提供的 pytorch2onnx.py 脚本进行模型转换。转换时,需要提供模型文件 checkpoint_file 和配置文件 config_file。成功转换后,将生成 onnx 模型文件,如 mask_rcnn.onnx。
其次,准备数据。使用一张测试用的,通过前处理将其转换为 OpenPPL 的输入数据。
接下来,构造并运行 runtime。OpenPPL 推理架构支持 x 和 CUDA,源码(适用于winform)选择 x 或 CUDA 进行运行。
最后,将网络的输出画到原图上。至此,使用 OpenPPL 完成了一个简单的目标检测推理任务。
完整代码及示例可在「ppl.nn demo 示例」中获取。欢迎关注我们的开源项目,交流 QQ 群号为 ,入群密令为 OpenPPL。
捋一捋pytorch官方FasterRCNN代码
pytorch torchvision 模块集成了 FasterRCNN 和 MaskRCNN 代码,本文旨在帮助初学者理解 Two-Stage 检测的核心问题。首先,请确保您对 FasterRCNN 的原理有初步了解,否则推荐阅读上一篇文章。
△ 代码结构
作为 torchvision 中目标检测的基础类,GeneralizedRCNN 继承了 torch.nn.Module。FasterRCNN 和 MaskRCNN 都继承了 GeneralizedRCNN。
△ GeneralizedRCNN
GeneralizedRCNN 类继承自 nn.Module,具有四个关键接口:transform、backbone、rpn、roi_heads。
△ transform
transform 接口主要负责图像缩放,并记录原始图像尺寸。缩放图像是为了提高工程效率,防止内存溢出。理论上,FasterRCNN 可以处理任意大小的,但实际应用中,图像大小受限于内存。
△ backbone + rpn + roi_heads
完成图像缩放后,正式进入网络流程。这包括 backbone、rpn、roi_heads 等步骤。
△ FasterRCNN
FasterRCNN 继承自 GeneralizedRCNN,并实现其接口。transform、backbone、rpn、roi_heads 分别对应不同的功能。
△ rpn 接口实现
rpn 接口实现中,首先使用 AnchorGenerator 生成 anchor,然后通过 RPNHead 计算每个 anchor 的目标概率和偏移量。AnchorGenerator 生成的 anchor 分布在特征图上,其数量与输入图像的大小相关。
△ 计算 anchor
AnchorGenerator 通过计算每个特征图相对于输入图像的下采样倍数 stride,生成网格,并在网格上放置 anchor。每个位置的 anchor 数量为 个,包括 5 种 anchor size 和 3 种 aspect_ratios。
△ 区分 feature_map
FasterRCNN 使用 FPN 结构,因此需要区分多个 feature_map。在每个 feature_map 上设置 anchor 后,使用 RegionProposalNetwork 提取有目标的 proposals。
△ 提取 proposals
RegionProposalNetwork 通过计算有目标的 anchor 并进行框回归,生成 proposals。然后依照 objectness 置信度排序,并进行 NMS,生成最终的 boxes。
△ 训练损失函数
FasterRCNN 在训练阶段关注两个损失函数:loss_objectness 和 loss_rpn_box_reg。这两个损失函数分别针对 rpn 的目标概率和 bbox 回归进行优化。
△ roi_pooling 操作
在确定 proposals 所属的 feature_map 后,使用 MultiScaleRoIAlign 进行 roi_pooling 操作,提取特征并转为类别信息和进一步的框回归信息。
△ 两阶段分类与回归
TwoMLPHead 将特征转为 维,然后 FastRCNNPredictor 将每个 box 对应的特征转为类别概率和回归偏移量,实现最终的分类与回归。
△ 总结
带有 FPN 的 FasterRCNN 网络结构包含两大部分:特征提取与检测。FasterRCNN 在两处地方设置损失函数,分别针对 rpn 和 roi_heads。
△ 关于训练
在训练阶段,FasterRCNN 通过 RPN 和 RoIHeads 分别优化 anchor 和 proposals 的目标概率和 bbox 回归,实现目标检测任务。
△ 写在最后
本文简要介绍了 torchvision 中的 FasterRCNN 实现,并分析了关键知识点。鼓励入门新手多读代码,深入理解模型机制。尽管本文提供了代码理解的指引,真正的模型理解还需阅读和分析代码。
深度学习实例分割篇——Mask RCNN原理详解篇
Hello,大家好,我是小苏
在前文已经为大家介绍过深度学习中的物体分类、目标检测和语义分割,对相关内容感兴趣的读者可以访问我的主页获取更多信息。我力求以通俗易懂的方式讲解网络结构原理,配合代码加深理解,欢迎一同学习,共同成长。
Mask RCNN是在Faster RCNN基础上引入FCN语义分割模块的深度学习模型,理解其原理前需掌握Faster RCNN结构及FCN语义分割的基本概念。
Mask RCNN主要由两部分组成:Faster RCNN结构和FCN语义分割模块。通过在Faster RCNN基础上添加FCN结构,Mask RCNN能够实现更精细的目标分割。
接下来,让我们深入了解Mask RCNN的细节。首先,从整体流程出发,Mask RCNN通过特征提取、候选框生成、ROI裁剪与对齐、分类与边界框预测、以及Mask预测五个步骤实现目标的分类、定位和分割。
在分类与边界框预测阶段,采用Faster RCNN中的分类头和回归头进行操作;而在Mask预测阶段,通过FCN结构对候选框对应的特征图进行操作,最终预测出目标的分割掩码。
Mask RCNN的创新点在于通过利用分类分支的预测类别直接提取出对应的Mask,从而消除不同类别之间的竞争关系,提高检测精度。
结构设计上,Mask RCNN采用结构2,要求backbone使用FPN网络以保证Mask分支拥有更多细节信息。结构1要求backbone采用resnet结构。通常,结构2效果更佳,建议使用。
损失函数方面,Mask RCNN由Faster RCNN损失和Mask分支损失组成。Mask损失采用交叉熵损失计算。
训练过程中,损失计算基于RPN网络提供的候选框;预测阶段,候选框来源于Fast RCNN网络。
总结,Mask RCNN通过整合Faster RCNN和FCN结构,实现了目标的精准分类、定位及分割。更多细节将在后续文章中深入探讨。
参考链接:Mask R-CNN论文、Mask R-CNN网络详解
附录:RoIAlign详解
RoIAlign与RoIPool目的相同,但RoIAlign在实现上避免了量化操作,保留小数,从而提升分割效果。具体过程包括特征提取、候选框生成、ROI裁剪与对齐,以及基于候选框的特征图操作。实验表明,使用RoIAlign的模型在分割任务上表现更优。
Facebook开源MaskR-CNN的PyTorch1.0基准,比mmdetection快且省内存
Facebook AI Research近期发布了MaskRCNN-Benchmark,一个基于PyTorch 1.0的Faster R-CNN和Mask R-CNN的开源实现。与Detectron和mmdetection相比,MaskRCNN-Benchmark在性能相当的情况下,展现出更快的训练速度和更低的GPU内存消耗,这对于性能优化和资源管理具有显著优势。
Detectron是Facebook AI Research的项目,它基于Python和Caffe 2构建,支持多种目标检测算法,包括Mask R-CNN。而mmdetection则是由商汤和港中文大学联合开发的PyTorch工具包,其性能稍高,训练速度和内存消耗更优。mmdetection支持多种检测框架,且易于使用,但安装过程可能较Detectron复杂。
MaskRCNN-Benchmark的亮点在于其提供了端到端的Mask R-CNN和Faster R-CNN基线模型,实验设置与Detectron一致,使用ImageNet的权重初始化。该项目在训练速度、内存消耗和推理准确率方面均有良好表现,并且提供了一个Webcam demo,以演示如何在实际环境中进行推理。此外,它还支持多GPU训练,并允许用户在自己的数据集上执行训练,只需遵循相关教程和配置指南。
总之,MaskRCNN-Benchmark是Facebook AI Research为PyTorch用户打造的一个高效、易用的目标检测工具,它在性能和资源管理上超越了Detectron和mmdetection,为开发者提供了更好的选择。
