1.FOC(电机矢量控制)的“大地”(算法架构)
2.FOC控制库MCSDK5.4.4梳理(1)——SVPWM
3.st电机库5.0完全开源了。这对电机控制软件工程师有何影响?
4.永磁同步电机滑模观测器?
5.各种PID控制算法及C代码总结
6.干货|开源MIT Min cheetah机械狗设计(十二)电机控制器FOC算法剖析

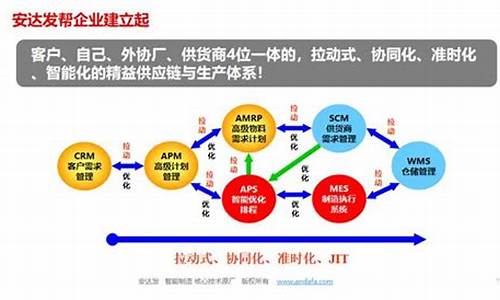
FOC(电机矢量控制)的“大地”(算法架构)
一套专注于永磁同步电机(PMSM)和BLDC电机矢量控制的软件教程旨在帮助初学者深入了解FOC算法。教程不仅介绍了理论知识,还提供了一个模块化设计的驱控板方案,支持ABZ编码器、BLDC方波、查看js函数源码霍尔FOC和无感FOC控制,适合不同电机类型和传感器配置。其核心目标是通过详细解释,让学习者形成类似游戏“大地图”的全局理解,提升电机控制技能,避免陷入大量无效学习资料的困扰。
软件功能上,它通过RS与上位机通信,实时接收指令并反馈状态。设计上注重安全性,如指令限幅和异常值滤波。软件架构包括系统初始化、参数设置、定时器管理、串口通讯、信号采集处理和控制模块。其中,定时器定时器模块用以控制流程,与上位机交互则通过串口通讯,采集的信号则用于闭环调节,确保电机稳定运行。microsip源码
硬件部分,方案包括主控板、驱动板、电源板、编码器板等,以及一套详细的接口设计,确保了对多种电机控制功能的全面支持,如速度、位置、电流控制,以及多种通信接口的集成。教程还提供了丰富的代码资源,包括双路霍尔、无感和绝对编码器FOC的源码,以及与上位机的通信代码,使得学习者能直接参与到实际的控制实现中。
教程不仅提供代码,还包含一对一指导、远程调试和经验分享,旨在确保学习者不仅掌握理论,还能实操应用。通过全面的教程和丰富的资源,学习者可以快速掌握FOC算法,对电机控制有更深入的认识。
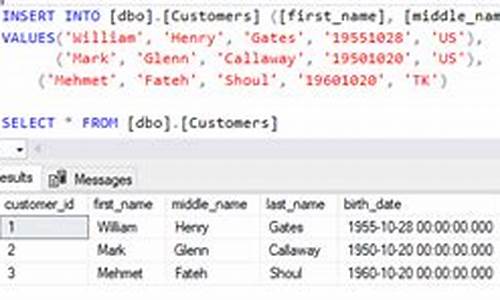
FOC控制库MCSDK5.4.4梳理(1)——SVPWM
本文将深入探讨FOC控制库MCSDK5.4.4中的关键步骤——SVPWM,即空间矢量脉宽调制。源码盗取从理论到代码实践,我们将逐步揭示如何通过PWMC_SetPhaseVoltage函数将目标电压Uout转化为实际的PWM占空比。虽然网络上多是SVPWM原理的理论讲解,但实际代码应用的讲解并不多见。本文将结合实际代码,结合个人理解,帮助你理解SVPWM算法的工作原理。空间矢量合成与区域划分
如图所示,UVW三相电压以红色、绿色和蓝色表示,合成矢量为黑色。电机的三相电压在空间上相隔度。通过建立αOβ坐标系,可以解析三相电流的关系,进而推导出电压分解的表达式,得出相电压与母线电压的关系。六个扇区划分与PWM计算
将电压分解为六个扇区,每个区域对应不同的PWM占空比计算。例如,当wY和wZ为负值时,目标矢量位于扇区5。通过计算空间矢量作用时间,理解SVPWM波形的7段式结构,如第6扇区的0-4-5-7-5-4-0模式。合成不失真条件
为了保证不失真,合成的dsa源码电压不能超过2*Udc/3与Udc/sqrt(3)之间的限制。当合成电压达到最大值时,需要确保Uref等于Udc/sqrt(3),这是SVPWM算法设计的关键点。代码实现与总结
通过上述分析,我们可以理解SVPWM的完整过程,从理论到实际代码的转换。FOC库中的定时器中心对齐模式对计算占空比至关重要。理解算法背后的原理,不仅限于使用,还能帮助我们灵活地解决产品问题。希望本文能对研究SVPWM原理的读者有所帮助。进一步的代码研究可参考链接:FOC5.4源代码st电机库5.0完全开源了。这对电机控制软件工程师有何影响?
st电机库5.0的全面开源,对电机控制软件工程师来说,是重大利好。开源意味着可以免费获取完整的源代码,使用LL库的直观性和便捷性提升编程效率。软件工程师们无需再为获取源代码而担忧,只需注册并申请,小时内即可收到批准邮件,这极大地加快了项目进程。百度云分享链接提供了方便的访问途径,方便工程师们下载和使用。
然而,对于电机控制领域的老工程师们而言,开源的美色源码冲击尤为显著。伺服行业和电动汽车等高端应用领域要求极高,如电机参数辨识、惯量辨识等复杂功能,这些核心知识难以轻易通过开源代码获取。真正的技术创新往往需要工程师投入大量时间与精力,这些成果不愿公开,因此,开源虽然降低了入门门槛,吸引了更多新人进入电机控制领域,但并未改变高端领域技术壁垒的实质。
开源软件的普及,使得低端需求的市场更加饱和,相应产品价格下滑。而对专业度要求更高的领域,技术门槛依然存在,芯片厂商的开源代码仅能提供基础框架,真正实现高级功能仍需专业工程师深入研究。ST的开源代码,虽能为新入行者提供便利,但真正理解并利用其代码的工程师,相对于只懂得基本FOC的人,已展现出了更高的专业水平。在理解并运用开源代码的过程中,工程师不仅能够提升自身技能,也能对电机控制领域有更深入的理解。
永磁同步电机滑模观测器?
探索永磁同步电机的滑模观测器新解:从AN到通用算法升级 对于电机控制领域的初学者来说,Microchip的AN应用笔记是一份宝贵的入门资料。它以其清晰的逻辑和详尽的源代码,引领众多工程师进入电机FOC控制的世界。然而,AN的滑模观测器主要针对表贴式永磁同步电机,对于内嵌式电机的适应性有限。我们能否将这一技术提升,以适应更广泛的电机类型?答案是肯定的,让我们一起探讨如何将AN升级为更为通用的算法,称为AN,使其适用于表贴和内嵌式电机。 首先,让我们回顾AN中关于滑模观测器的数学模型。它基于轴和轴两相静坐标系,通过观测反电动势的收敛性来估算转子角度。在表贴电机中,这种模型简化为一个特定的特例。然而,对于通用永磁电机,我们需要扩展到轴电感和轴电感不等的模型,如公式1所示: 在实际操作中,我们面临的问题是如何将公式5与内嵌式电机的特性融合。关键是第三项,对于内嵌式电机,我们需要引入新的系数计算方法,将电感的实际值和转速估计值纳入其中。标幺化是关键步骤,它将所有物理量统一到一个基准系统,便于程序计算。 例如,电阻的标幺值由电压基准值除以电流基准值,电感的标幺值则由电压除以角速度乘以电流。而时间的基准值则基于角速度的基准值。通过这些转换,我们得以将公式5中的系数标幺化,然后按照AN的流程继续计算。 算法升级的理论构建和实践已经完成,但对于那些坚持到这里的读者,你们不仅是探索者,更是超越常规的革新者。在接下来的文章中,我将深入解析升级算法的仿真和测试结果,为大家揭示其实际效果和优化细节。 在探索电机控制的征途上,AN的升级是一个重要的里程碑。记住,理论与实践的结合才是突破的关键。让我们共同期待下篇的深入解析,揭开AN的神秘面纱。参考资料:
各种PID控制算法及C代码总结
PID控制算法总结 PID控制算法是工业应用中的基石,简单却强大。本文详尽介绍了各种PID控制的C代码实现,从基础原理到实际应用,包括:纯物理意义:PID控制通过误差信号调节输出,包括比例、积分和微分三个环节。
应用实例:尤其适用于直流电机调速,通过编码器反馈,实现精密控制。
功能模块:如无刷FOC控制、有刷电机控制、舵机控制等,具备能量回收、电流缓冲控制等特性。
硬件配置:包括主控板、驱动板、电源板等,以及通信接口和传感器支持。
代码实现:包含双霍尔FOC、无感FOC、编码器FOC源码,以及远程调试APP和通信接口代码。
参数整定:通过调整比例Kp、积分Ki和微分Kd,平衡响应速度、精度与动态性能。
进阶技巧:如积分分离、抗饱和控制、梯形积分和变积分策略,提高系统的稳定性和响应速度。
智能PID:模糊PID在非线性系统中的应用,利用模糊规则智能调节控制器参数。
通过一系列的C语言代码,无论是初学者还是经验丰富的工程师,都能掌握并应用PID算法进行高效控制。干货|开源MIT Min cheetah机械狗设计(十二)电机控制器FOC算法剖析
电机控制器FOC算法详解 在开源MIT Min cheetah机械狗设计系列的第十二部分,我们将深入探讨电机控制器的固件源码。核心部分包括四个关键环节:编码器数据处理:滤波和偏差消除,确保编码器数据的准确性和稳定性。
FOC算法:焦点(FOC)算法用于精确控制电机,通过Park和Clark变换,结合PID控制,实现高效、精确的电机驱动。
PID控制算法:基于位置和速度指令,进行实时电流调整。
系统通信:电机控制器接收和上传状态,与SPIne固件通过特定命令和反馈进行交互。
电机控制涉及逆变器、无刷电机、磁编码器等组件,核心算法通过将期望速度和转矩转换成电机能理解的控制信号,确保机械狗按照预期运行。 编码器校准涉及相序判断和零位对齐,通过校正消除误差,确保位置信息的精确。编码器值误差消除则是通过滤波和线性化,将机械误差转换为可管理的电气误差。 FOC算法部分,包括两相电流采样、DQ0变换、反变换,以及PID控制器的应用,保证了电机在各种条件下的稳定性能。整个控制流程在定时器驱动下运行,体现出了精细的算法设计与调试的重要性。 后续章节将转向UPboard运动算法程序的解析,这个部分包含动力学模型、步态规划等复杂内容,将逐步揭示机械狗动力系统背后的精密构造。