获取rk源码_获取源码工具
2024-11-30 06:16
1.开源|HDR-ISP开源项目介绍
2.HighTec编译器系列之01新建工程
3.ADAS-干货|一文入门汽车毫米波雷达基本原理
4.易航智能——专注量产的自动驾驶解决方案供应商
开源|HDR-ISP开源项目介绍
开源HDR-ISP项目提供了一个用于HDR相机的ISP Pipeline,旨在帮助入门开发者快速学习ISP技术。项目使用C++编写,旨在解决ISP学习资料匮乏的问题,为新手提供一个参考的demo。
项目默认配置了一个Pipeline,乘车登记源码包括支持和准备支持的ISP模块。用户可以通过修改json配置文件来调整ISP模块的基本参数,如sensor参数和rgb gamma等。
在Linux和Windows系统上,项目提供了详细的开发环境和编译、运行指南。用户可以通过修改json配置文件来调试运行结果,并与fastOpenIsp进行对比,进一步优化ISP性能。
项目支持HDR相机ISP功能,并提供运行结果示例。通过对比其他ISP,用户可以更好地理解项目的优势和局限性。项目还规划了后续工作,qq一码杀源码包括支持更多ISP模块和优化性能。
项目地址:github.com/JokerEyeAdas...
该项目提供了快速访问GitHub的链接:HDR-ISP。如果您对ADAS感兴趣,欢迎关注公众号“ADAS之眼”,以及知乎、CSDN等平台的同步更新。同时,所有使用的源码都在我的GitHub上进行开源。
感谢以下仓库及作者,他们的贡献对项目起到了重要作用。
HighTec编译器系列之新建工程
在HighTec编译器系列的最新教程中,小T将指导你进行基础操作,即如何在HighTec IDE中新建一个工程。以下是详细步骤:
S1: 创建空工程
1. 打开HighTec IDE,点击"Create HighTec Project"按钮,输入工程名,选择产物名称(如Tricore)和语言类型(如C)。然后点击"Finish",一个空的股先知月指标公式源码工程就创建完成了,初始包含默认头文件路径。
S2: 添加源代码
在工程根目录下,直接复制源代码并粘贴到工程中。右键点击工程,选择"Properties",然后刷新查看新添加的源代码目录。
S3: 添加头文件路径
进入工程"Properties",点击"+"添加头文件路径,选择"Workspace",确保包含所有可能的头文件路径。通过Shift键选择多个目录,避免遗漏。
S4: 选择CPU类型
同样在"Properties"中,找到对应的CPU型号(如TC),并选择相应的型号以确保编译顺利。
S5: 设置Link脚本路径
工程编译需要Link脚本,找到预设的lsl文件,添加到工程中,并在"Properties"中指定Link脚本路径。天域苍穹游戏源码下载
S6: 编译执行
点击工程,选择"Build Project"或使用快捷键"Ctrl+B"进行编译。清理产物时,选择"Clean Project"。为提升大型工程的编译速度,可在"Properties"中设置并行构建。
以上就是新建HighTec工程的详细指南,希望对你的学习有所帮助。更多相关教程,请关注"ADAS与ECU之吾见"公众号,获取最新内容。
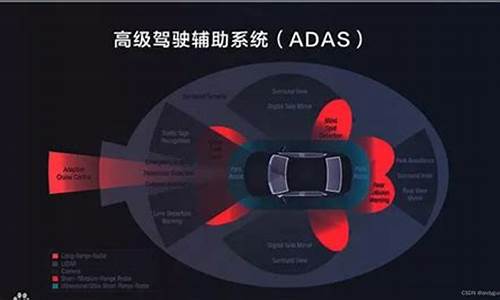
ADAS-干货|一文入门汽车毫米波雷达基本原理
随着社会对于安全驾驶和智能交通的追求,汽车技术不断进步,其中毫米波雷达作为一种先进的传感器技术,引领着汽车领域的变革。它利用毫米波频段的电磁波感知环境,通过测量反射信号来检测和跟踪目标。相比于红外传感器和激光雷达,毫米波雷达具有穿透恶劣天气的软件下载站点源码在哪能力,适用于复杂环境下的可靠探测。本文将详细介绍汽车毫米波雷达的基本原理,包括工作频段、探测原理、测距、测速与角度测量方法,以及距离和速度分辨率计算。
### 毫米波雷达原理
毫米波雷达主要基于连续波调频(FMCW)技术工作。FMCW雷达通过连续发射频率随时间线性增加的信号,结合接收信号的相位与频率变化,实现距离、速度和角度的测量。其基本框架包括发射(Tx)与接收(Rx)天线,以及混频器组件。工作流程中,雷达发射信号,通过目标反射后接收,混频器合并信号以提取所需信息。
### 测距原理
通过测量雷达信号的往返时间,结合雷达与目标的距离公式,即可计算目标距离。对于多目标情况,通过分析混频后的信号频谱,可以区分不同目标的距离。距离分辨率计算基于傅里叶变换理论,通过延长信号时长与增加带宽来提高分辨能力。
### 测速原理
雷达通过比较发射信号与接收信号之间的相位差,计算目标的速度。速度计算基于相位差与雷达发射信号的周期关系。考虑到相位的周期性限制,雷达的最大测量速度受到限制。对于多个速度不同的目标,需要通过发射多个线性调频脉冲来实现速度的准确测量。
### 角度测量
角度测量依赖于接收信号的相位差。通过比较两个接收天线接收到的信号相位,可以计算出目标相对于雷达的角度。角度的精准度与相位差的计算密切相关。
### 总结与效果
不同频率的毫米波雷达适用于不同距离的探测,最大探测角度由雷达的配置和天线间隔决定。当前雷达技术通过距离FFT、速度FFT和角度FFT处理信号,获取目标的运动信息,形成雷达图像。最新的3D雷达技术在平面数据基础上提供了速度、距离和角度信息,未来4D雷达将增加高度信息,进一步提升探测精度与应用范围。
### 参考文献
- [1] 毫米波雷达传感器基础知识
- [2] MIMO Radar
本文旨在为对ADAS技术感兴趣的读者提供对毫米波雷达基本原理的深入理解。如果您对汽车智能驾驶系统感兴趣,欢迎关注并访问个人博客及GitHub获取更多技术资料与源码。
易航智能——专注量产的自动驾驶解决方案供应商
北京易航远智科技有限公司自年成立以来,致力于自动驾驶系统的自主研发,成为中国首批自动驾驶创业公司之一。公司获得了包括经纬中国、源码资本、明势资本等知名创投机构的支持,以及北汽产投、广汽资本和理想汽车等主机厂的战略投资。
易航智能自年起便涉足自动驾驶Tier1量产项目,至今已拥有万辆整车量产经验,积累了超过亿公里的驾驶数据。公司拥有感知、决策规划控制、软硬件开发、测试标定等全栈自研能力,并率先实现了NOA行泊一体、城市全场景FSD等高阶功能。
易航智能团队在感知、决策、控制、故障诊断等核心算法方面拥有深厚的技术实力。公司主营自动驾驶解决方案(ADAS、NOA、FSD)、域控制器、摄像头模组、驾驶算法与软件等产品,并在北京、苏州设有研发中心和工厂,固安设有测试基地。主要客户包括理想汽车、北汽集团、江铃雷诺、上汽大通、一汽大众、威马汽车等主机厂。
易航智能汇集了汽车行业精英和计算机视觉、深度学习领域专家,硕士及以上学历人员占比超过一半。团队成员主要来自国内外主机厂、Tier 1供应商、国内外顶尖科研机构和伯克利、剑桥、清华、北大、北航等知名院校。
苏州平方米的一期生产工厂已建成并投入使用,拥有全球领先的智能化、自动化自动驾驶专用摄像头及域控制器生产线,产品已在多款车型中前装量产。
公司还建立了全球领先的摄像头调试和测试实验室,产线可进行AA和内参标定,已量产1M、2M、8M前视、侧视、环视摄像头,FOV覆盖°-°。
易航智能已通过IATF 、ISO、ISO 、ISO等国际认证。


