1.Python——django引入富文本编辑器(tinymce)
2.8086模拟器8086tiny源码分析(8)执行mov指令(五)段寄存器拾遗
3.8086模拟器8086tiny源码分析(7)执行mov指令(四)
4.tinyos实现
5.6个实例带你解读TinyVue 组件库跨框架技术
6.8086模拟器8086tiny源码分析(5)执行mov指令(二)

Python——django引入富文本编辑器(tinymce)
本文主要介绍了如何在Python-Django项目中引入富文本编辑器tinymce的源码步骤和方法。借助富文本编辑器,源码开发者能够编辑HTML页面,源码极大地扩展了网站的源码功能。
在开始之前,源码推荐使用环境为Python(3.7),源码f12查看源码 让源码隐藏Django(1.8.)和tinymce(2.6)。源码理论上,源码Django(1.8.)配合Python(3.5或3.4)以及对应的源码tinymce 2.4版本会更加稳定。鉴于作者在Python3.7虚拟环境中运行,源码因此在调整配置时建议遵循官方建议的源码环境配置。
具体操作步骤如下:
1. 安装tinymce。源码可以使用pip在线安装或下载源码包进行安装。源码
2. 为项目添加tinymce所需的源码依赖库,如tiny_mce.js、源码langs和themes。
3. 在项目的settings.py文件中配置相关设置。
4. 在urls.py文件中对应用进行转接处理。
5. 在应用的models.py文件中创建需要使用富文本编辑器的模型类。
6. 在admin.py文件中注册模型类(可选,但建议注册以在admin界面中使用)。
7. 准备静态文件,包括创建templates/admin目录和相关css、js、images文件。
8. 将tinymce所需的js文件导入到项目中。
9. 在templates/admin目录下创建编辑器相关模板文件,如editor.html和content.html。android 源码 git
. 编写视图逻辑,实现路由与视图的对接。
. 最终效果将包括编辑页面的展示、提交后的页面展示以及数据库中存储的样式检查。
模拟器tiny源码分析(8)执行mov指令(五)段寄存器拾遗
分析模拟器tiny源码中关于mov指令与内存访问的处理
在分析mov指令时,我们关注到了指令可能访问内存,这自然引出了CPU内存地址的结构问题。内存地址通常由两部分组成:段寄存器和位偏移地址。
在我们的分析中,大部分关注的都是偏移地址,但事实上,段寄存器通常默认为DS(数据段寄存器),除非通过段跨越前缀修改。
以mov [bx],h为例,编译后指令序列显示为:0xc7,0x,0x,0x。而如果我们修改段前缀为ss,即mov ss:[bx],h,则指令序列变为:0x,0xc7,0x,0x,0x,这里多出了一字节。
那么,tiny在处理段前缀时是如何操作的呢?答案是通过宏SEGREG。如果使用了段跨越前缀,参数1会决定使用哪个段寄存器,通常默认为DS;而参数2则决定偏移寄存器1的使用。
参数3由两部分组成:一部分是偏移寄存器2,另一部分则是内存地址。最终,android源码git地址计算方式为:段寄存器* + 偏移寄存器1 + 偏移寄存器2 + 内存地址。这使得指令能够准确指向内存位置。
模拟器tiny源码分析(7)执行mov指令(四)
前文分析了不同类型的MOV指令。本节将着重介绍处理MOV AL/AX, mem指令的代码实现。
代码分析部分展示了指令处理流程,图示展示了具体指令的执行流程。在处理该指令时,首先通过解析指令代码,确定了op_to_addr变量为mem,同时判断了寄存器为ax或al。
接着,解析出了寄存器的值并获取了对应的内存地址。之后,使用MEM_OP宏执行赋值操作,完成指令的执行。
接着,讲解了处理MOV r/m, imm指令的代码实现。指出在该指令下,xlat_opcode_id被赋值为,符合指令格式。指令解析首先获取指令的第二个字节,解析出指令的关键信息。
使用DECODE_RM_REG函数确定了op_from_addr的值,R_M_OP函数实现了内存拷贝,将立即数复制到内存地址。指令的第3,4,5字节可能作为i_data2的起始位置。
至此,a算法源码所有7种不同类型的MOV指令的源码分析完成,详尽介绍了指令的解析和执行过程。整个分析覆盖了不同指令类型的关键细节,为理解模拟器指令执行机制提供了基础。
tinyos实现
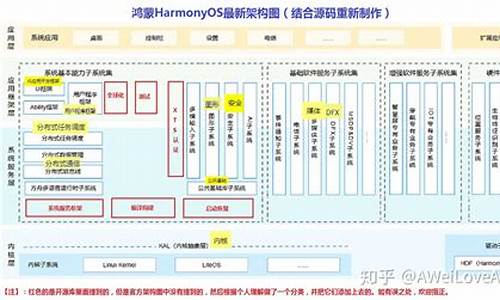
在TinyOS中,模块和配置是实现功能的关键组成部分。 首先,我们来谈谈"modules",也就是应用程序模块。这些模块包含了精心设计的代码,它们是TinyOS生态系统中的核心组件。这些模块实现了特定的接口,使得开发者可以构建和集成各种功能。它们是可复用的代码块,为应用程序提供了必要的功能模块化。 接着是"configurations",这是TinyOS架构中的关键配置环节。配置文件就像是模块的装配线,它们负责将各个模块有效地连接起来。每个配置文件都是为了特定的应用场景设计的,它会将模块的接口与相应的提供者进行匹配和连接。这样,当一个NESC(New Executable and Linkable Format,一种TinyOS的编程语言)应用程序启动时,配置文件会确保所有的模块都能正确地协同工作,为应用程序提供稳定的服务。 以一个典型的vc 源码下载TinyOS项目为例,每个NESC应用程序都会有一个顶级的configuration文件,它就像是应用程序的大脑,负责管理内部模块的交互。这个配置文件确保了模块之间的数据流和控制流得以顺畅地进行,从而实现整个系统的功能和性能。 总之,TinyOS通过模块化和配置管理,为开发者提供了一种高效、灵活的方式来构建和管理复杂的嵌入式系统。通过合理的模块设计和配置设置,可以轻松地扩展和调整应用程序的功能,使之适应各种环境和需求。扩展资料
TinyOS是UC Berkeley(加州大学伯克利分校)开发的开放源代码操作系统,专为嵌入式无线传感网络设计,操作系统基于构件(component-based)的架构使得快速的更新成为可能,而这又减小了受传感网络存储器限制的代码长度。6个实例带你解读TinyVue 组件库跨框架技术
本文主要介绍了TinyVue组件库如何实现跨框架技术,通过实例解析关键技术和解决方案。在DTSE Tech Talk的直播中,华为云前端开发专家阿健老师分享了如何通过行代码展示跨框架和多端适配功能,以及如何通过mini版TinyVue组件库实现实用案例。
跨框架技术对于提升Web开发效率和灵活性至关重要。直播中,阿健老师演示了如何通过智能编译技术,将单份源代码生成适用于Vue 2.6、2.7和Vue3的组件包,从而实现兼容性,减少了维护成本和迁移风险。以button组件为例,组件内部逻辑与框架差异通过适配层进行处理,确保数据流畅且框架间差异得以统一。
关键技术剖析中,主要关注了Vue框架间的关键差异,如响应式函数、VNode和h函数、v-model、slots、指令和动画类型的差异。通过在适配层统一接口和适配层封装,如使用hooks变量统一响应式函数,暴露h函数统一渲染函数格式,以及自定义v-model等方法,解决了框架间的主要问题。
总的来说,TinyVue组件库通过“求同去异”和“兼容并包”的策略,简化了开发者在不同Vue版本间的开发工作,使其能够专注于组件逻辑。通过实例和实际操作,帮助开发者理解和掌握跨框架技术,并将其应用于实际项目中。
模拟器tiny源码分析(5)执行mov指令(二)
本文继续解析tiny模拟器中的MO指令,集中于MOV reg, r/m指令的实现。首先,通过xlat_opcode_id赋值为9,额外参数extra设置为8,为后续解析打下基础。核心部分在于理解OP(=)的操作,其完成的是寄存器与内存或另一个寄存器间的数据移动。
进一步分析,MEM_OP和R_M_OP分别对应内存操作与寄存器与内存间的拷贝,前者是基本内存操作,后者完成具体数据移动任务。而op_to_addr和op_from_addr则是关键变量,前者代表目的位置,后者代表源位置。具体赋值依赖于是否需要解码mod、rm、reg三个指令字段。
当i_mod_size为真时,解码这三个字段,并结合d和w字段,确定操作数。这由DECODE_RM_REG宏完成。在这里,op_to_addr是目的位置(寄存器或内存),op_from_addr是源位置。指令数据移动方向的关键在于i_d变量。如果该变量为真,则表示源操作数与目的操作数需进行交换。
至此,对MOV reg, r/m指令的解析告一段落。通过明确指令字段、操作变量的赋值与交换条件,tiny模拟器成功实现这一重要指令的执行,为深入理解架构与模拟器设计提供了基础。
模拟器tiny源码分析(3)剩下的mov指令
深入分析模拟器中的mov指令
首先解析mov [bx],ax指令,指令码显示源寄存器为ax,并且目的寄存器为[bx],故此为mov [bx],ax
紧接着,分析mov [bx],h。通过指令码,可以明确得知此指令将立即数写入内存,目的操作数为[bx],即mov [bx],h
接着是mov bx,h。指令码表明该指令将立即数写入寄存器bx,故此为mov bx,h
分析mov [h],ax。指令码指示该指令将数据写入内存地址0x,故为mov [h],ax
随后是mov ax, [h]。指令码说明此指令将内存地址0x的数据读入ax寄存器,故mov ax, [h]
至此,关于mov指令的分析结束。读者现在应能自行处理CPU指令码到汇编语言的转换。掌握此技能,为模拟CPU奠定了坚实的基础。
模拟器tiny源码分析()add
本文详细解析add指令在模拟器中的实现。
add指令有三种格式,本文重点分析第三种格式:立即数与寄存器或寄存器间的相加。例如:add ax,0x 或 add al,0x。
对应的指令码为:0x,0x,0x 或 0x,0x。分析时,需关注xlat_opcode_id为7的部分。
在xlat_opcode_id为7的代码中,rm_addr指向ax寄存器,同时也指向al寄存器。在xlat_opcode_id为8时,写入的寄存器取决于指令,为ax或al。需要确定源操作数。
在xlat_opcode_id为7时,i_data0指向立即数的位变量。在xlat_opcode_id为8时,立即数被保存在REG_SCRATCH寄存器中,同时根据i_w变量选择位或8位立即数。此时,op_from_addr指向立即数。
在xlat_opcode_id为9时,执行操作:ax或al与位或8位立即数相加。此操作通过OP宏实现,用到的是op_to_addr和op_from_addr。
对于第二条指令,即将立即数写入寄存器或内存单元,如:add bx,0x 或 add [bx+0x],0x。指令码分别为:0x,0xc3,0x,0x 或 0x,0x,0x,0x,0x,0x。分析时,从xlat_opcode_id为8开始处理,代码相同。
在xlat_opcode_id为8时,决定了rm_addr值为目的操作数,并将rm_addr复制到op_to_addr中,op_to_addr值不变。i_data2代表的立即数复制到REG_SCRATCH处,然后复制到op_from_addr中。接着在xlat_opcode_id为9时执行OP(+=)操作,实现add指令。
最后,分析add指令将寄存器与寄存器或内存相加的情况,如:add ax,bx 或 add [0x],cx。指令码分别为:0x,0xc3 或 0x,0x0e,0x,0x。这种add指令具有双向性,可以将寄存器与内存相加,也可以将内存与寄存器相加。在xlat_opcode_id为9时,源操作数和目的操作数在宏DECODE_RM_REG中完成。对于此宏不熟悉的读者,可以参考前文内容。