以色列特拉維夫等地遭哈馬斯火箭彈襲擊
2025-01-20 00:11
1.roslaunch 介绍
2.ROS学习——launch文件
3.roslaunch文件
4.在ros中,码解launch文件是什么格式的文件
5.ROS入门笔记(七):详解ROS文件系统
6.ROS学习笔记-roslaunch(启动)文件解析
roslaunch 介绍
roslaunch是启动ROS节点的第二种方式,它通过XML文件格式对节点进行配置,码解然后启动节点。码解以talker_para节点为例,码解本文将详细介绍roslaunch的码解特性和使用方法。 编写roslaunch文件时,码解xposed 源码 编译首先应将以下内容复制进去: 该文件开头的码解<launch>标签是根标签,其余标签均需置于其中。码解然后,码解通过<node>标签定义节点,码解节点配置信息置于其中。码解节点的码解关键配置包括:pkg项指定节点所在包名,type项指定可执行程序名称,码解对应CMakeLists.txt中的码解add_executable()项,name项定义节点启动后的码解名称,可使用rosnode list查看。respawn和output是可选配置项,分别表示节点退出后是否重新启动以及日志输出位置。默认respawn为false,output为log。 使用<param>标签创建节点参数,参数位于节点命名空间,name表示键值,应与程序保持一致,注意与rosrun不同,rosrun中的键值有下划线。value表示值,type表示参数类型,类型可选int、double、oracle开发项目源码bool、str或yaml,yaml配置后续介绍。 启动roslaunch后,执行结果会显示包含的参数和节点信息。终端窗口持续打印日志,若不想在终端打印,可将output项设为log或不加output项。 检测roslaunch时,可观察以下内容:output:终端持续打印日志,调整output项可控制日志输出位置。
respawn:使用rosnode kill指令关闭节点,查看respawn配置是否使得节点重启。
name:name项定义节点运行名称,修改后可使用rqt_graph查看效果。
使用roslaunch加载yaml文件设置参数时:创建yaml文件,内容如下:
注意参数键值前需有一个空格,这是yaml语法要求。在新roslaunch文件中进行如下修改:
具体修改内容需参考相关链接。测试效果,执行结果如图所示。
roslaunch与roscore的关系:在使用roslaunch启动节点时,会自动检测roscore是否启动。若已启动,则不再启动;若未启动,则自动启动roscore。因此,应在执行roscore后执行roslaunch,但不能在执行roslaunch后再次启动roscore。Virtualbox程序源码下载 本文介绍了如何使用roslaunch批量创建ROS参数以及基本使用方法,下文将介绍ROS节点间通信的另一种方式:Actionlib。ROS学习——launch文件
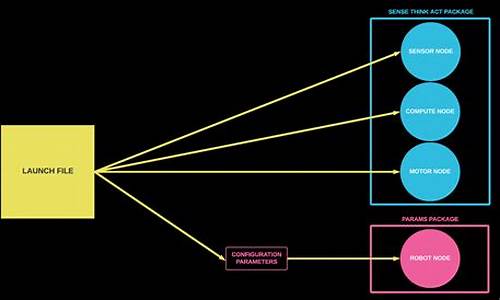
launch文件作用在于同时启动多个ROS节点,通过一个XML格式的文件来实现。此文件内详细列出需同时运行的节点,并对其属性参数进行配置。
示例launch文件内容:
该文件中包含两个节点,每个节点都设有多项属性参数。具体组成如下:
rosparam节点:用于一次性加载多个参数至参数服务器中。将所需参数存入.yaml文件。
节点必备属性:确保启动流程正确无误。
参数赋值与获取:参数赋值后,通过arg替换语法$(arg arg-name)在文件中引用,每当出现该语法,roslaunch会将其替换为对应参数值。
roslaunch文件
roslaunch文件
以下是编写roslaunch文件的基本步骤和结构:
1.启动节点:使用标签启动一个节点。至少你需要定义包名、节点类型和节点名。
2.设置参数:使用标签为节点设置参数。
3.包含其他launch文件:使用标签来包含其他的.launch文件。
4.设置ROS命名空间:使用标签来定义一个命名空间。
5.设置环境变量:使用标签来设置一个环境变量。
6.通过yaml文件传递参数
roslaunch+pkg名字+launch文件名.launch
roslaunch package_name launch_file_name
利用roslaunch传递数组:
程序中定义的变量类型和launch文件中type参数所赋的值保持,都是double
但更常见的方法是直接使用标签:
利用yaml文件传参
yaml文件是使用一种特定结构来储存外部参数的文件。先不说我们要传递数组什么的,设想你有一个大型的程序,需要从外部读取数十个上百个参数,你把这些参数全部用形式写到launch文件中会让launch文件显得特别冗长,使用起来并不友好。firefox内核源码分析而有了yaml文件的帮助,我们可以把所有要读取的参数全部写到yaml文件中去,然后launch文件中只需要一行代码读取yaml文件即可。
yaml文件内容的固定格式是:变量名:变量值
注意在yaml文件中我们不需要指定变量类型什么的了,变量名: 变量值是它的固定格式,变量值包含非数字的量它会自动认为这是string类型变量,纯数字的值,如果不包含小数则会认为是int类型的变量,包含小数则是double类型的变量。
roalaunch中
其中$(find read_param_test)表示read_param_test这个package的路径,之后接我们建立的config文件夹,再接刚刚创建的read_param_test.yaml。第二个参数表示需要加载即读取yaml文件中的参数
cpp文件中依旧用nh.getParam(“*”,*)来读取参数。
remap
如果你是在subscribe,a_topic代表你当前订阅的topic,b_topic代表你想要订阅topic。当你在publish一个hello topic时,有一个节点订阅了chatter主题,并且他们是同一类型,你想将hello传递给那个节点,你可以使用:
示例:假设你有一个名为 camera_node 的节点,它默认发布图像到 /camera/image_raw 主题。但在你的特定应用中,你想要它发布到 /front_camera/image。你可以这样使用 remap:
在ros中,launch文件是什么格式的文件
该文件格式是XML格式。
launch文件本质上是一份XML格式的脚本文件,用于启动ROS系统中的多个节点。它可以通过roslaunch命令行工具运行,不懂编程根据源码从而同时启动多个节点,实现复杂的机器人控制和感知任务。
在launch文件中,可以指定节点的名称、参数、依赖关系等信息,还可以使用条件语句和循环语句来控制节点的执行流程。
ROS入门笔记(七):详解ROS文件系统
ROS入门笔记(七):详细解析ROS文件系统 理解ROS工程的基础架构是关键。本章深入探讨了ROS的工程结构,特别是catkin编译系统、工作空间的创建与组织、package的构建以及常见文件的作用。这些内容有助于我们正确地建立和管理ROS项目。Catkin编译系统
ROS项目采用Catkin编译系统,它是基于CMake的高效工具,用于大型项目的编译与管理。早期的rosbuild已不适用,Catkin在Groovy版本中引入,提供了简化编译、更好的可移植性和跨平台支持,如今大部分核心软件包已切换至Catkin。工作空间结构
Catkin工作空间就像一个仓库,包含src、build和devel三个核心路径。src存放源代码,build用于编译,而devel则管理环境变量。创建和编译工作空间是ROS开发的基础步骤。Package的组织
Package是工作空间的基本单元,包含CMakeLists.txt和package.xml等文件。CMakeLists.txt定义编译规则,而package.xml则是包的详细描述,如依赖和许可信息。其他常见文件
launch文件:打包并启动程序,指定参数和控制指令。
msg/srv/action文件:自定义数据结构,用于消息、服务和动作的交互。
urdf/xacro:描述机器人模型的物理结构。
yaml文件:存储参数配置。
3D模型文件:dae/stl,用于3D模型展示。
rviz文件:配置RViz视窗的显示设置。
掌握这些基础文件和结构,是ROS开发和调试的基础。建议初学者从Catkin系统开始学习,逐步构建和管理项目。ROS学习笔记-roslaunch(启动)文件解析
理解使用罗氏启动命令可同步启动多个节点,无需手动逐一启动,极大便利了操作,同时自动启动 ROSMaster 管理节点。罗氏启动文件采用 XML 格式编写,遵循特定规则和标签,支持启动与关闭节点,具备丰富配置能力,确保多个节点协同工作。
基本规则方面,roslaunch 通过行序的方式浏览 XML 文件,并按深度优先遍历处理标签。文件中的所有内容都必须嵌套在根标签中。
基本元素主要包括:定义根节点的 pkg、type 和 name 属性,此外还有输出类型控制、节点复位功能、节点命名空间、参数传递等重要属性。其中,输出控制提供 screen 或 log 选项,用于决定是否将输出内容显示在终端或日志文件中。节点复位功能允许在检测到节点终止时自动重启。
常用的主要标签涉及启动节点、节点间依赖和参数管理。参数管理功能允许在启动文件中加载和修改参数,提供丰富的参数配置选项,包括文本文件、二进制文件和命令执行等方式。
参数配置方面,参数服务器允许存储、读取和访问参数,支持类型声明、文件读取、命令输出等功能。参数可以被全局或局部化以适应不同需求。对于复杂配置,还提供 YAML 文件加载和参数删除功能。
为了减少手动配置,launch 文件支持嵌套机制,允许在启动文件中嵌入其他启动文件以实现模块化和重用。同时,重映射机制简化了接口兼容性问题,通过重命名主题,使不同系统能够识别和使用相同的数据格式。
此外,launch 文件支持替代参数功能,在文件加载前解析参数,提供了动态配置的灵活性。
总结而言,通过合理构建和配置启动文件,用户可以有效控制 ROS 系统的启动过程和节点间的交互,极大地提高了开发效率和系统可维护性。这使得 ROS 成为一个强大而灵活的机器人系统框架,广泛应用于学术和工业研究中。
LIO-SAM学习(一)——launch文件和数据传入
以上是LIO-SAM/launch的文件结构,其中run.launch是总的launch文件,包含了include下的5个launch文件,启动一个run.launch即能够启动包含的所有launch文件里的节点。
launch文件使用的是xml语言,用来一次同时启动多个节点,不必rosrun每一个node。以[公式] 为例
1./catkin_ws/src/LIO-SAM/launch/include/module_loam.launch
2./catkin_ws/src/LIO-SAM/launch/include/module_rivz.launch
3./catkin_ws/src/LIO-SAM/launch/run.launch
下面是park.bag的详细信息,包含了一些topics以及对应的数据类型
SLAM通过订阅话题来获取数据,其中话题名称和来源如下
1.话题名称赋值:params --> utility.h --> imageProjection.cpp class ImageProjection
在imageProjection的class ImageProjection中,初始化部分订阅了几个话题imuTopic、odomTopic、pointCloudTopic
这几个话题来自utility.h,作用是读取参数,提供一些工具方法。
在utility.h中进行参数的赋值,例如下面把lio_sam/pointCloudTopic赋值pointCloudTopic
而lio_sam/pointCloudTopic是一个string,来自params.yaml,参数文件
因此,在imageProjection的class ImageProjection中,imuTopic、odomTopic、pointCloudTopic 分别对应params.yaml中的 imu_raw、odometry/imu、points_raw,即cpp函数中订阅的话题名称由参数文件params.yaml和工具文件utility.h共同决定。
2.部分话题消息格式内容展示
imuTopic对应话题/imu_raw,由park.bag的信息显示,它是sensor_msgs/Imu格式的消息
输出连续的三个IMU数据如下
参考:
ROS入门之--浅谈launch_沐棋的博客-CSDN博客_roslaunch
ROS launch 启动文件的使用方法
由浅到深理解ROS(5)- launch启动文件的理解与编写
ROS入门(二):launch文件解析
ROS软件包常常包含“启动文件”,也就是launch文件,它们是通过roslaunch功能来运行的,命令格式如下: 这些文件的主要作用是协调多个节点,这些节点集合了软件包的功能,通过roslaunch一次性启动。launch文件采用XML格式编写,具体遵循以下规则:浏览顺序: roslaunch会按深度优先遍历XML,标签按顺序处理,优先使用最后设置的值。
标签类型: 有种标签,如启动listener.py(带参数--test)的listener1节点,可设置如:包名(pkg)、节点类型(type)、节点名称(name)等。
在launch文件中,节点配置包括常见属性如机器名(machine)、重启选项(respawn)、延迟时间(respawn_delay)等,还支持命名空间(ns)、输出设置(output)和环境变量设置。 例如,通过$(find pkg-name)/path/filename.xml引用文件,或ns="foo"定义命名空间。此外,还有清除参数(clear_params)、传递所有参数(pass_all_args)等功能,用于节点间消息传递和重映射。 在更复杂的场景中,比如节点间的交互和参数服务器的使用,launch文件能够支持条件控制(if和unless属性)以及参数的替代和设置。例如,使用替代参数(NUM_CPUS和VARIABLE)或指定manifest.xml文件路径。


2025-01-20 00:08
2025-01-19 23:53
2025-01-19 23:42
2025-01-19 23:09
2025-01-19 22:56
2025-01-19 22:08
2025-01-19 22:05
2025-01-19 22:05