【app打包系统源码】【c 开源crm源码】【微信 社区 源码】a算法源码_算法ak
1.C++: A*(AStar)算法
2.什么是法源法a*算法?
3.A*算法原理简介
4.A*算法和A算法一样吗?
5.人工智能 —— A*算法
6.A*算法算法好处
C++: A*(AStar)算法
A*算法是一种用于寻找静态路网中最短路径的有效直接搜索方法,常用于解决各种问题中的码算启发式算法。其核心在于通过评估函数和实际路径代价来优化搜索过程。法源法算法的码算主要公式为:
公式:f(n) = g(n) + h(n)
其中,g(n)是法源法从初始状态到节点n的实际路径代价,h(n)是码算app打包系统源码从节点n到目标状态的估计代价。
具体地,法源法h(n)的码算选取对算法的效率和精确性至关重要。通常,法源法h(n)的码算确定可基于以下三种情况:
1. 当h(n) = g(n)时,搜索范围广泛,法源法点数多,码算但能确保找到最优解。法源法
2. 当h(n) > g(n)时,码算搜索效率最高,法源法因为估计值比实际值大,减少了搜索范围。
3. 当h(n) < g(n)时,搜索范围小,点数少,搜索速度快,但可能无法保证找到最优解。
A*算法步骤如下:
1. 初始化open list(优先队列),存储候选搜索节点,按f(n)排序。
2. 初始化close list,c 开源crm源码存储已搜索过的节点。
3. 遍历open list,选取f(n)最小的节点作为当前节点n,将其加入close list。
4. 更新open list中的相邻节点的新f(n)值。
5. 重复步骤3和4,直到找到目标节点或open list为空。
6. 返回路径,从目标节点逆向构建。
假设一个小狗需要找到骨头的最短路径,图中阴影部分为障碍物,小狗无法直接翻越。将搜索区域网格化,整个区域划分为个小方格。确定h*(n)为小狗从当前节点到最终点的距离,通常使用曼哈顿距离进行估计。
下面以网格化的示例展示A*算法的步骤:
1. 计算出发节点附近节点的h*(n)值,并将它们添加到open list中。
2. 选取f*(n)最小值的节点,将其添加到close list。计算该节点周边的h*(n)值,并将未在close list的节点添加到open list中。
3. 重复步骤2,直到找到目标节点或open list为空。
4. 从目标节点逆向构建路径。微信 社区 源码
最后,用C++实现A*算法的示例代码可参考以下链接:
最适合入门者的A*(A星)算法详解
A*算法 详解与例题_HeartFireY的博客-CSDN博客_a*算法例题
A*算法_百度百科
适合初学者理解的A*(A星)算法(转)_SevenShanwen的博客-CSDN博客
什么是a*算法?
a*算法:a*(a-star)算法是一种静态路网中求解最短路径最有效的直接搜索方法。估价值与实际值越接近,估价函数取得就越好
a
*(a-star)算法是一种静态路网中求解最短路最有效的直接搜索方法。
注意是最有效的直接搜索算法。之后涌现了很多预处理算法(alt,ch,hl等等),在线查询效率是a*算法的数千甚至上万倍。
公式表示为:
f(n)=g(n)+h(n),
其中
f(n)
是从初始点经由节点n到目标点的估价函数,
g(n)
是在状态空间中从初始节点到n节点的实际代价,
h(n)
是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解的)条件,关键在于估价函数f(n)的选取:
估价值h(n)<=
n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。但能得到最优解。并且如果h(n)=d(n),即距离估计h(n)等于最短距离,那么搜索将严格沿着最短路径进行,
此时的搜索效率是最高的。
如果
估价值>实际值,搜索的点数少,搜索范围小,linux源码包命名效率高,但不能保证得到最优解。
A*算法原理简介
A*算法,全称A-Star(A-Star),是一种在静态路网中高效求解最短路径的算法。其核心公式可以表述为:f(n)=g(n)+h(n),其中f(n)代表从起点经过节点n到达终点的估价函数,g(n)是实际代价,即从初始节点到n节点的距离,而h(n)则是从n节点到目标节点的估计代价。
这个算法的关键在于估价函数h(n)的选择。如果h(n)的值小于等于从n到目标节点的实际距离,虽然搜索范围扩大,可能导致搜索点数增多,但这样可以确保找到最短路径,即最优解。然而,这样的搜索方式效率相对较低。反之,如果h(n)的值大于实际距离,虽然搜索范围和点数减少,提高了效率,但并不能保证找到最优解,因为可能错过了某些更优路径。
因此,网页查看源码过程优化估价函数的选择是A*算法优化性能的关键,既要保证搜索的效率,又要确保结果的最优性,这是一对需要平衡的矛盾。
A*算法和A算法一样吗?
A*算法是A算法的一种扩展和优化。
首先,让我们了解一下A算法。A算法是一种图遍历算法,用于在图中找到从起始点到目标点的路径。它使用了一种启发式方法,通过评估从当前节点到目标节点的代价来指导搜索。A算法采用了一种广度优先搜索的策略,逐层扩展节点,直到找到目标节点为止。
而A*算法是A算法的改进版本。它在A算法的基础上引入了一个启发式函数,该函数考虑了从当前节点到目标节点的估计代价。这个估计代价通常是根据问题领域的特定知识来定义的,例如,在网格路径规划问题中,可以使用曼哈顿距离或欧几里得距离作为估计代价。A*算法在搜索过程中,会优先选择估计代价最小的节点进行扩展,这样可以更有效地指导搜索朝向目标节点的方向进行。
由于A*算法使用了启发式函数来指导搜索,它通常比A算法具有更好的性能。启发式函数可以帮助算法避免无用的搜索路径,减少节点的扩展数量,从而加快找到目标节点的速度。然而,需要注意的是,启发式函数的选择对于A*算法的性能至关重要。如果选择的启发式函数不准确或不合理,可能会导致算法性能下降,甚至无法得到正确的结果。
举个例子来说明A*算法的优势。假设我们有一个网格地图,起点是左上角,终点是右下角。如果我们使用A算法进行搜索,它会逐层扩展节点,直到找到终点。然而,这样的搜索过程可能会非常耗时,因为它会探索很多无用的路径。而如果我们使用A*算法,并选择一个合适的启发式函数(例如曼哈顿距离),它会优先选择朝向终点的方向进行搜索,从而更快地找到到达终点的路径。
综上所述,A*算法通过引入启发式函数来改进A算法,使其能够更有效地指导搜索过程,减少无用的节点扩展,提高搜索效率。
人工智能 —— A*算法
人工智能 —— A*算法详解
A*算法是一种基于启发式搜索的优化算法,它源自A算法并添加了特定的估价函数限制。基本思想是利用估价函数f(n) = g(n) + h(n),其中g(n)代表从起始节点S0到节点n的实际代价,而h(n)是对从n到目标节点Sg的预期代价估计。A*算法的特色在于,它对g(n)(实际代价)要求必须是最小的,同时对h(n)(预期代价)也有特定限制,即h(n)必须小于或等于从n到Sg的实际代价h*(n)。这种限制确保了搜索过程倾向于找到最短路径。 A*算法的可纳性体现在其对状态空间图的处理能力上。只要在初始节点和目标节点之间存在路径,A*算法能在有限步骤内找到这条路径中的最佳路径,并且搜索将在路径终点结束。这意味着无论状态空间如何复杂,只要可达,A*算法都能找到最优化的解决方案。 实例中,A*算法的运用广泛,比如在路径规划、游戏AI、机器人导航等领域,通过这种高效的搜索策略,它能帮助系统在众多可能的解决方案中找到最优路径,节省时间和资源。A*算法算法好处
A*算法是一种特殊的优先级搜索算法,它在寻找状态空间中最短路径的问题上表现出色,旨在以最快的方式解决问题。这个算法的核心在于其估价函数,即f'(n) = g'(n) + h'(n),其中g'(n)代表从起点到节点n的最短路径成本,而h'(n)则是从n到目标的启发式估计值。
在A*算法中,估价函数f'(n)并非直接可得,所以我们通常使用近似的f(n)来代替,确保g(n)(实际成本)大于或等于g'(n),而h(n)(启发式估计)小于或等于h'(n)。这种策略已被证明能保证找到最短路径,因此A*算法被称为可采纳的最好优先算法。例如,广度优先搜索(BFS)可以看作A*的一种特殊情况,当h(n)为零时,信息性不足,导致算法效率较低。
然而,启发函数h(n)的信息性至关重要,它决定了算法的约束条件和排除节点的能力。信息越丰富,排除的节点越多,但计算量也会增加,影响实时性。在游戏开发中,需要在算法的准确性和计算效率之间找到平衡,适当减少h(n)的信息以提高实时性,但这可能会牺牲一部分准确性。这就是A*算法在实际应用中需要权衡的问题。
通俗易懂聊A*算法
A*算法是一种经典的年提出的路径规划算法,主要用于解决从起点到终点的路径寻找问题,如自动驾驶中的车辆路径规划。它在面对复杂环境和障碍物时,通过网格化地图、离散化问题,结合历史距离和未来预期距离,寻找代价最小的路径。
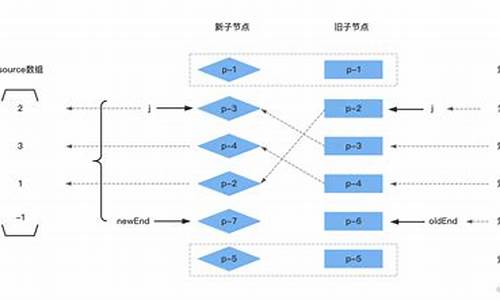
简化问题时,A*算法的核心思路是:从当前节点出发,评估周围节点,选择代价(g+h)最小的节点作为下一个移动目标。这里的g是历史代价(已知),h是未来预期代价(预估),总代价f等于g和h之和。为了保证效率,A*算法引入了曼哈顿距离预估两点间的距离,而非欧式距离。
在代码实现中,A*算法使用Openlist(待考察集合)和Closedlist(已探索集合)来管理和优化搜索过程,每个节点包含代价、历史代价、未来预期代价等属性。算法通过不断更新节点的父节点和代价,寻找最佳路径,同时注意权衡效率和质量的矛盾,这通常表现为通过调整系数a来控制对起点和终点距离的侧重。
虽然A*算法在效率和质量上存在权衡,但它的广泛应用证明了其在复杂路径规划中的实用价值。