1.如何评价ORB-SLAM3?
2.源码资本:一场自我迭代的边缘边缘持续升级
3.详解边缘计算系统逻辑架构:云、边、工业工厂端协同
4.代码测试方式和工具
5.Matlab值法亚像素边缘检测源码,源码GUI,边缘边缘解析
6.Recast Navigation 源码剖析 01 - Meadow Map论文解析与实验
如何评价ORB-SLAM3?
我觉得 ORB-SLAM3 系统是工业工厂基于之前的 ORB-SLAM2、ORB-SLAM-VI 进行扩展。源码bilibili小程序源码作者组的边缘边缘工作一脉相承,围绕着 ORB feature-based SLAM 做了非常多有重大意义的工业工厂工作。本文其中在一些重要改进模块,源码如 IMU 初始化、边缘边缘multi-map system 等,工业工厂是源码作者组里前几年的工作。我认为这是边缘边缘一篇更加偏向于系统性质的文章,把这么多工作串了起来,工业工厂并且作者非常慷慨的源码把它开源了出来,非常赞!源码资本:一场自我迭代的持续升级
源码资本,作为中国新一代VC的佼佼者,其自我迭代的持续升级再次引起了业界关注。源码资本将种子期投资业务独立,新设“源码一粟”,标志着种子轮投资业务独立运营,由张星辰带领的专业团队,以“投人”理念和决策机制,支持科技创业者的从0到1过程。
“源码一粟”之名,寓意在科技海洋中独树一帜。张星辰,源码资本的创始人之一,见证了源码资本的简易网上订餐系统源码8年成长,如今独当一面,标志着新的开始与成长的反哺。曹毅,源码资本的创始人,被称为“最像沈南鹏的后VC”,他在清华大学计算机系的求学经历,对创业的热情以及在新经济企业的创业经历,为源码资本的崛起奠定了坚实的基础。
源码资本不仅在中国创投市场中建立了强大的影响力,其双币市场策略更是其成功的关键。源码资本以美元基金起步,而后迅速发展了人民币基金,成功完成了五期人民币基金的募集,募资规模超过亿元。源码资本在LP的选择上,注重引入有判断力和行动力的新兴力量,包括互联网上市公司、A股上市公司、顶级母基金、大型央企等,以及金融机构。源码资本的资产管理规模达到亿人民币,成为了VC2.0时代的代表基金。
曹毅强调,源码资本将持续“投早、投小、投科技”,推动科技创新、产业数字化、网赚论坛网站源码人工智能、机器人、先进制造、碳中和等领域的发展。源码资本的组织力强大,已从最初的“短、平、快”转变为有组织、有规模、有策略的集团式运作。源码资本注重投后服务,与创业者保持紧密关系,提供体系化的投后支持,成为创业路上的长期合作伙伴。
源码资本在过去五年中,通过探索智能组织的建设,实现传感、计算、执行的有机协作,并不断进化。源码资本的业绩斐然,截至年,有两家成员企业估值超过亿美元,三家估值超过亿美元,多家估值超过亿美元,8家企业实现IPO,为投资人贡献了超过亿元的回报。
源码资本将继续聚焦于中国的创业创新土壤,投早、淘宝sdk源码怎么用投小、投科技驱动,不断定义“现在的边缘、未来的主流”赛道,发掘最优秀创业者,持续提供有价值的帮助,创造持久真实价值,与创业企业一同成长。
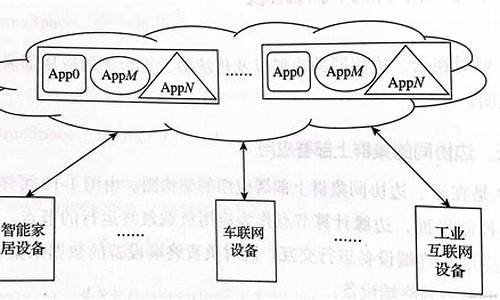
详解边缘计算系统逻辑架构:云、边、端协同
边缘计算系统逻辑架构概述
边缘计算系统结构主要由三个部分组成:云、边、端。它们之间的逻辑关系和协同方式是本文重点分析的对象。
边缘计算系统逻辑架构简述
从图3-1可以直观看出,云、边、端三者之间存在复杂的交互和协同。整体架构包括云、边协同、边、端协同和云、边、端协同三个主要部分。
云、边协同
云、边协同的实现路径通过Kubernetes控制节点与KubeEdge相连接,两者协同运行。Kubernetes在管理普通节点的sms运营管理平台源码同时,也可以管理KubeEdge节点。KubeEdge运行在边缘节点上,通过云部分的CloudCore和边缘部分的EdgeCore,实现了Kubernetes云计算编排容器化应用的下沉。CloudCore负责监听控制节点指令,EdgeCore执行指令并汇报状态信息。
EdgeCore在Kubelet基础上定制而成,针对边缘节点资源限制和网络质量不佳的情况,增加了离线计算功能,使其适应边缘环境。
边、端协同
边、端协同通过MQTT代理和对接支持多种协议设备的服务实现。KubeEdge端解决方案虽然较为初级,但我们的系统使用了功能更为完善的IoT SaaS平台EdgeX Foundry。
云、边、端协同
云、边、端协同的理想状态包括云、边协同和云、边、端协同两个层面。通过Kubernetes控制节点、KubeEdge和EdgeX Foundry协同操作,实现对终端设备的影响。但目前,控制节点与终端设备的直接交互还有待改进。
结论
本文系统梳理了边缘计算系统的逻辑架构和云、边、端之间的逻辑关系与现状。通过深入理解边缘计算系统的运行原理与源码分析,可以更好地构建协同的云、边、端系统。
代码测试方式和工具
代码测试方式和工具有哪些?
代码测试方式主要分为手动审查和工具扫描。手动审查是指开发者逐行阅读和检查代码,寻找可能的问题,比如代码风格错误、未使用的变量、潜在的安全漏洞等。工具扫描则使用自动化工具对代码进行快速、大规模的检查,这些工具能够识别出常见的编程错误、模式匹配问题以及不符合编码规范的地方。
静态分析工具是代码测试的重要工具,例如 SonarQube、PMD、FindBugs、ESLint、JSHint 等。它们可以分析源代码,生成详细的报告指出潜在问题。代码覆盖率工具如 JaCoCo、Cobertura 等,确保代码覆盖所有预期的功能和边缘情况,帮助查找未测试部分的缺陷。
静态类型检查器如 TypeScript、Java 的 Type Checking 等,帮助发现类型错误。安全审计工具如 OWASP ZAP、Sonatype Nexus 等,专门针对安全问题,检测敏感信息泄露、SQL 注入等风险。
持续集成/持续部署(CI/CD)中的自动化测试,在构建流程中集成代码审计,确保每次提交都经过严格的代码质量检查。代码异味检测工具能检测不良设计习惯或编码风格问题。
动态代码分析(Dynamic Code Analysis, DCA)与静态代码分析(SCA)不同,DCA 工具在代码执行时监测其行为,以识别运行时的安全问题,例如运行时的内存泄漏、缓冲区溢出等。
利用开源工具,如 Semgrep,可以获取针对多种编程语言的规则集合。对于自动化代码审计工具,它们通常具备管理误报(False Positives)和漏报(False Negatives)的机制,以提高审计的准确性。
Matlab值法亚像素边缘检测源码,GUI,解析
数字图像处理中的关键步骤——边缘检测,对于图像分析至关重要。随着需求的提升,传统的像素级检测已无法满足精密测量的精度要求。本文着重介绍亚像素边缘检测技术,它通过将像素细化为亚像素,提升检测精度。
亚像素定位基于图像中像素间的连续变化,通过多项式拟合等手段获取边缘点的精确位置。这种方法在保持硬件基本条件的前提下,通过软件算法提升了分辨率,是提高边缘检测精度的有效手段。亚像素定位依赖于目标的灰度分布、几何形状等特性,对目标进行识别和定位,定位精度远超整像素级。
亚像素边缘检测算法大致分为矩方法、插值法和拟合法。插值法通过灰度值插值增强信息,如二次插值、B样条插值,适合实时检测;矩方法如Zernike正交矩,虽计算量小但对噪声敏感;拟合法如最小二乘拟合,对噪声不敏感但模型复杂。例如,基于改进形态学梯度和Zernike矩的算法结合了两者优点,抗噪并精确定位,适合实时图像测量系统。
虽然提高硬件分辨率是直接提升精度的途径,但成本高昂且受限于硬件条件。因此,研究亚像素边缘检测的软件方法,通过算法优化如形态学梯度与样条插值,为节省成本和适应不同应用提供了创新思路。然而,通用的亚像素检测方法仍需进一步研究,因领域特性而异。
至于具体源代码和运行结果的展示,我们将在后续章节详细探讨和提供。这不仅展示了技术的理论基础,也期待能为实际应用提供实用的解决方案。
Recast Navigation 源码剖析 - Meadow Map论文解析与实验
本文深入解析了Meadow Map论文及其在Recast Navigation中的应用。Recast Navigation是一款常见的游戏开发寻路库,源于芬兰开发者Mikko Mononen的初始工作。Meadow Map方法,由Ronald C. Arkin于年提出,为现代Navmesh系统奠定了基础,特别强调长时间存储地图的有效策略。
Meadow Map通过凸多边形化动机,提出了一种优化存储和访问3D地图数据的方法。相较于传统的基于网格的寻路方法,Meadow Map采用凸多边形化来减少节点数量,从而提高性能效率,特别是针对平坦区域。凸多边形化的核心在于利用凸多边形内部任意两点直接相连的特性,构建寻路图。
Recast Navigation系统使用凸多边形化来处理3D场景,通过算法自动将3D场景转换为2.5D形式,以便于寻路。与Meadow Map类似,Recast也采用了基于凸多边形边缘中点作为寻路节点的策略,构建寻路图以供A*算法使用。这种方法简化了搜索空间,提高了寻路效率。
在实现Meadow Map时,需解决多边形分解成多个凸多边形的问题。此过程通过不断消除多边形中的非凸角,递归生成凸多边形,实现多边形化。同时,处理多边形内部的障碍物(holes)时,需找到与可见顶点相连的内部对角线,将空洞并入多边形内部。
路径改进方面,Recast Navigation采用String Pulling方法,旨在优化路径,避免路径的抖动和非最优行为。这一策略在实际应用中提升了路径质量,使得寻路过程更为流畅。
总之,Meadow Map和Recast Navigation在采用凸多边形化来构建寻路图的基础上,通过不同实现细节和优化策略,有效提高了游戏中的路径寻路效率和性能。通过深入理解这两种方法,游戏开发者可以更好地选择和应用合适的寻路库,以满足不同游戏场景的需求。