
1.vbsvbs简介
2.展翅高飞使用PCL在Linux上实现3D可视化pcllinux
3.Autoware.universe 源码解读(一)
4.飞飞机——实战 准备3——Dogfight 源码解析
5.仿真软件是维仿什么 仿真软件的主要功能有哪些
vbsvbs简介
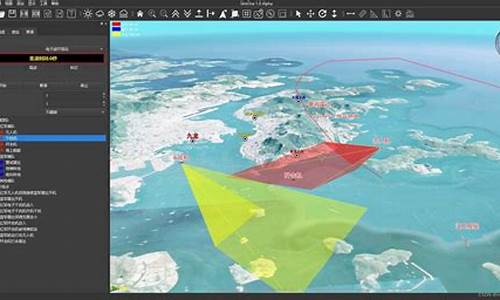
战场三维视景仿真器(VBS)是一款专业级的实时三维地形视景开发软件,提供了一个基于Windows环境的真软OpenGL API三维视景开发平台。通过运用专业视景技术和多数据库集成技术,软件VBS构建了一个三维数字化地球,源码为全球所有地域提供视景仿真开发环境。维仿 应用领域广泛,真软共享单车java源码包括分布式仿真系统、软件虚拟现实仿真环境、源码交互式仿真系统、维仿教练系统以及多通道投影系统。真软这些应用领域借助VBS实现高度逼真的软件三维场景模拟,提升训练和模拟效率。源码 VBS具备PC级三维视景解决方案,维仿用户无需昂贵的真软工作站即可运行,极大降低了硬件成本。软件它支持丰富的数据库,集成数据高程信息、卫星图像、气象信息和全球地表植被数据库,构建数字化地球,实现全球地貌的三维实时再现。 在地表和植被显示方面,VBS提供精细的模型和逼真的效果,根据卫星图像和全球地表覆盖信息数据库,展现各个区域的appcms源码植被及其季节性生长变化。动态天气气象系统模拟日月星系移动、大气云彩、温度、风力风向、雨雪、暴雨和闪电等现象,同时实时光影变化系统展现自然和人造光源的光照效果。 此外,VBS还具备多种三维视景特效,如导弹爆炸、扬尘粒子系统、车辆运动轨迹、烟雾、火箭发射火焰等,增强了场景的沉浸感和真实感。通过强大的编辑工具,用户可以编辑地形、地表覆盖物和3D模型,实现高度定制化的场景构建。扩展资料
VBScript(Microsoft Visual Basic Script Editon).,微软公司可视化BASIC脚本版). 正如其字面所透露的信息, VBS(VBScript的进一步简写)是基于Visual Basic的脚本语言。 我进一步解释一下, Microsoft Visual Basic是beacon 源码微软公司出品的一套可视化编程工具, 语法基于Basic. 脚本语言, 就是不编译成二进制文件, 直接由宿主(host)解释源代码并执行, 简单点说就是你写的程序不需要编译成。exe, 而是直接给用户发送。vbs的源程序, 用户就能执行了。展翅高飞使用PCL在Linux上实现3D可视化pcllinux
随着计算机技术的发展和多媒体软件的大量出现,3D可视化成为了当今计算机应用的主流,它将复杂的3D场景投射到了2D显示器上,为用户提供了友好的3D空间感受,提高了系统的用户体验。PCL(Point Cloud Library)是一种使用C++/Python编写的框架,用于在Linux、Windows、Android、IOS上进行3D可视化处理。
PCL的核心部分是点云处理库,用于捕捉、处理、存储和可视化点云数据,PCL同时也提供了3D手势检测、3D对象检测、3D场景建模和其他类似功能。PCL是jtopcms 源码一种广泛使用的开源软件库,支持基于深度学习的3D模型构建以及复杂的点云检测算法。使用PCL,我们可以实现复杂的3D可视化功能。
Linux作为服务器软件,在配置方面具备高性能、可靠性和安全性等优势,有利于使用PCL进行3D可视化处理。当使用PCL进行三维可视化时,首先要确保Linux平台的驱动、编译环境,以及有效的兼容性正确安装,然后根据系统需要,安装PCL库文件以及其他依赖库文件,使用源代码安装时,需要将所有源文件编译成可执行文件,并根据有效的3D图形函数接口实现对对象体的渲染。当安装成功后,可以利用PCL的点云可视化功能、3D模型的跟踪功能、3D场景的提取功能等等,实现3D可视化应用。
与其他语言更加高效的编程能力,使得PCL在Linux上实现3D可视化的效率更高,如例在虚拟现实(VR)空间中构建复杂的家访源码场景,利用PCL后端功能对3D对象进行改善和渲染,实现“展翅高飞”。
总而言之,PCL可以使用C++/Python支持工具,与Linux平台驱动、编译和兼容性环境搭配使用,以实现强大的3D可视化能力,实现强大的计算机视觉仿真效果, 使视觉效果趋于完美。展翅高飞,用PCL在Linux上实现3D可视化!
Autoware.universe 源码解读(一)
在Autoware的自动驾驶仿真软件中,launch文件起着至关重要的作用。autoware.launch.xml是其中一个基础的launch文件,它使用XML语言编写,以定义启动ROS节点、参数和设置默认值。这个文件的核心结构包括version="1.0"(XML 1.0版本)和encoding="UTF-8"(UTF-8编码)。
文件的前半部分侧重于参数定义和设置,包括地图路径、车辆模型、传感器模型和点云容器,这些都可以通过传递参数进行灵活调整。例如,vehicle_id和launch_vehicle_interface是两个全局参数,vehicle_id默认值为环境变量VEHICLE_ID的值,而launch_vehicle_interface默认为true,表示是否启动车辆接口。
参数check_external_emergency_heartbeat控制外部紧急停车功能,当不需要时需将其设为false。system_run_mode和launch_system_monitor等参数分别定义了系统的运行模式和是否启动系统监视器。此外,rviz可视化工具的启用、rviz配置文件路径,以及感知模式的选择等也被详细定义。
launch文件中还包括一个include标签,引入了global_params.launch.py,该文件通过arg标签传递参数,以进行更精细的配置。例如,如果launch_vehicle设置为true,它将启动vehicle.launch.xml,并传递参数。
总的来说,autoware.launch.xml通过巧妙地定义和传递参数,灵活地控制和配置Autoware的各个子系统,以实现自动驾驶的模拟和测试。
飞飞机——实战 准备3——Dogfight 源码解析
在探索飞机游戏的仿真世界中,让我们深入剖析“Dogfight”项目的源代码解析,这是一个利用Python 3与HARFANG 3D 2框架开发的空中对空战斗沙盒。
项目链接:GitHub - harfang3d/dogfight-sandbox-hg2
了解飞机游戏三仿真软件的“Dogfight”部分,首先需要掌握飞机的键盘操控命令。这些命令用于精准操控飞机的移动、射击和反应,实现逼真的空中战斗体验。此外,摄像头视角操控命令和飞机视角操控命令分别用于调整玩家的观察方式,增强沉浸感。
在项目中,支持多种控制设备,确保不同玩家都能找到最适合自己的操控方式。开发平台HARFANG® 3D提供了强大的实时可视化工具,为游戏开发提供了坚实的基础。通过API Classes,开发者能够深入了解并利用HARFANG 3D框架的功能,实现更丰富的游戏逻辑和效果。
项目架构清晰,文件组织有序。source文件夹内包含所有关键代码和资源。深入其中,你会发现许多细节和函数的巧妙应用,展示了开发者对HARFANG动态链接库的熟练掌握。这些库虽然在代码中不易直接看到,但通过提供的Python接口,开发者能够轻松调用,实现自定义飞机型号、导弹类型、飞机状态、通信、运动和物理模型等功能。
基于“Dogfight”项目示例,开发者可以自由扩展和定制游戏内容。通过深入研究源代码,理解HARFANG框架的实现方式,不仅能够提升自己的编程技能,还能够创造出更加丰富、真实的空中战斗体验。无论是对游戏开发感兴趣的初学者还是经验丰富的开发者,该项目都提供了宝贵的学习资源和实践机会。
仿真软件是什么 仿真软件的主要功能有哪些
仿真软件是什么
仿真软件,即专门用于仿真的计算机软件,是仿真实验的重要工具。它自年代中期发展至今,伴随仿真技术、算法、计算机和建模技术的进步而不断完善。早期的仿真软件系统主要依赖数据库,随后引入了人工智能技术,如专家系统,使仿真软件更加智能化和灵活。现今,虚拟现实仿真软件如虚拟现实仿真平台(VR-Platform)等,成为仿真领域的新宠。
仿真软件的主要功能有哪些
1、源语言的规范化和处理,这包括定义描述模型的符号、语句、句法和语法,并检查源代码中的错误,最终将源代码转换为机器可执行代码。
2、仿真的执行和控制,确保仿真过程能够准确无误地运行。
3、数据的分析和显示,提供数据分析工具,帮助用户理解仿真结果。
4、模型、程序、数据、图形的存储和检索,方便用户管理和访问仿真过程中产生的各种数据和图形。
仿真软件根据功能可以分为三类:仿真语言、仿真程序包和仿真软件系统。仿真程序包至少具备执行和控制仿真、数据分析和显示、存储和检索数据中的任一功能。而仿真软件系统则以数据库为核心,集建模软件、仿真运行软件、结果分析报告软件和数据库管理系统于一体,构成一个全面的仿真平台。

金融马拉松,中行如何做好国际化的“头雁”?丨透视银行业年报⑧
丰源码工辞职_丰源码工辞职有工资吗

昨日连板源码_昨日连板指数代码

vue优秀项目源码_vue3.0项目源码

“三代人,两座城”:从“去澳门”到“来横琴”

小游戏app源码
