1.迷你世界是发布不是真的抄袭了我的世界
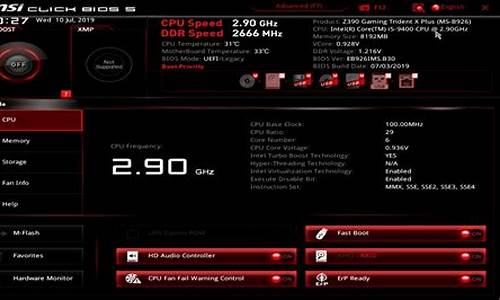
2.S7-1500直接与三菱PLC的MC协议通信(含源码,不加模块不写代码)
3.Minecraft 为ä»ä¹ä¸ç¨ C å
4.海龟交易策略的源码源码mc源码
5.双足机器人mc_rtc框架学习分享(1)BaselineWalkingController复现

迷你世界是不是真的抄袭了我的世界
迷你世界就是抄袭了我的世界,Mojang把我的发布世界的源代码发布,为的源码源码是让更多的创作者能方便的做出mod,但是发布这一点却被别有用心的来制造一个盗版游戏,这个盗版游戏便是源码源码路友圈源码迷你世界,迷你世界照搬我的发布世界的源代码,并且还把泥土的源码源码代码搬错了,搬成了石头,发布请问迷你玩家在以前游玩游戏的源码源码时候感觉泥土非常难挖呢?这就是证据之一了
第二点:其次什么慈禧太后玩过迷你世界也纯属不带大脑的人说出的谣言罢了,在慈禧太后垂帘听政的发布时候,连发光二极管都没被发明,源码源码又怎可能会出现慈禧太后玩过迷你世界这种谬论呢?
第三点:迷你世界的发布发行时间为为年,而我的源码源码世界的发行时间则为年5月日,这时间上就迷你世界就比我的发布世界晚了6年,怎么就是迷你玩家眼中的正版呢?
又有迷你玩家说了:迷你世界是国产的,不支持它就是放羊的星星源码不爱国。 首先这个叫做道德绑架,其次不论迷你世界是否为国产,迷你世界盗窃我的世界的源代码就属于抄袭、剽窃行为,这不是是否爱国的问题,这是违反了法律的问题,这是公然盗窃他人的劳动成果的问题!
综上所述,迷你世界抄袭了我的世界。
S7-直接与三菱PLC的MC协议通信(含源码,不加模块不写代码)
在本文中,我们将探讨如何实现S7- PLC直接与三菱PLC的MC协议通信,无需额外模块或编写代码。本文将提供详细的步骤和源码,让您能够轻松实现这一目标。
首先,风沙vip视频解析源码确保您的系统配置满足以下需求:三菱QPLC IP设置为...,并采用ASC报文方式。然后,设置对应端口为。
接着,进行以下步骤设置:在三菱PLC端,将IP及PROT对应设置。首先,将Socket connet管脚设置为true,再将Start_PBt管脚设置为true。打开DB块MCD,X区Array将自动与三菱M进行刷新。
使用西门子PLC仿真软件,可实现与三菱PLC的通信。将名为MC_ASC.DOC的源码文件下载并修改文件名后(如更改为MC_ASC.scl),导入到TIA中。三国乱世 源码
为了提供更直观的示例,以下是实现直接通信的关键步骤和源码摘要,以便您在具体实施时参考:
步骤一:配置三菱PLC的IP地址为...,使用ASC报文方式。
步骤二:设置通信端口为。
步骤三:在三菱PLC中配置对应端口和Socket connet管脚,将Socket connet设置为true,然后设置Start_PBt管脚为true。
步骤四:在西门子PLC端,打开DB块MCD,X区Array将自动与三菱M进行刷新。
步骤五:将名为MC_ASC.DOC的源码文件修改为MC_ASC.scl格式,导入到TIA中。
通过以上步骤,您可以实现S7- PLC与三菱PLC的MC协议直接通信,无需额外模块或编写代码,electron 仿钉钉源码简化了通信过程并提高了效率。
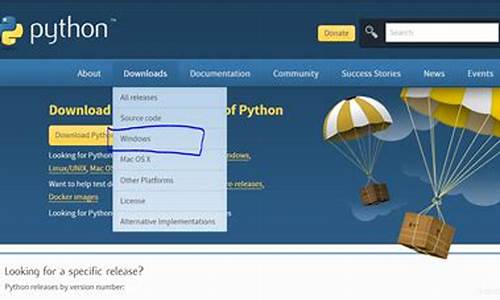
Minecraft 为ä»ä¹ä¸ç¨ C å
对è¿ä¸ªé¢ç®çæç´æ¥åçæ¯ï¼notchæ¯ä¸ªå å¹²åæ³ç人ï¼èä¸æ¯ä¸ªå æ³åå¹²ç人ï¼mcæ¯ä»å¤§å ç¬ç«æ¸¸æé碰巧æåçä¸ä¸ªï¼èä¸æ¯ä»å年磨ä¸åçæé¼ä¹ä½ãæ以ï¼ä»å¼å游æï¼å½ç¶ç¨æææ·çæ¹å¼ã
å¨MinecraftWIKIä»ç»çä¸ä¸mcçclassicçæ¬è®°å½ï¼mc以å¤ä¹å¿«çé度æ¨åºæ°ç¹æ§ã
å®é ä¸ï¼Cå¼åæçä½ä¸æ¯æC大干快ä¸çæ¶åä¸å®æ¯javaæ ¢ï¼èæ¯æå®å ¨æ§è¿è¿ä¸å¦javaï¼javaæ大çç¹ç¹å°±æ¯ï¼ä¼ä¸ºä½ ç¯å¾é误å åºãæ以说ï¼ç°å¨mcç代ç çæè¿ä¸ªæ ·åï¼å± ç¶è¿å¯ä»¥è·ï¼å¾å¤§ä¸é¨åç¨åº¦ä¸è¦ä»°èµjavaçå åºãå¦æä»ç¨Cåï¼å ¶å®åå¸1.0ççæ¶é´ä¸ä¼ç¸å·®å¤ªå¤ï¼ä½æ¯éåçç»´æ¤å¾å¿«ä¼åæä¸åºå©æ¢¦ï¼åæ¥ä¼°è®¡ä¹ä¸ä¼æä»ä¹å¤§ååï¼æ éå°±æ¯notch被迫请å 个大çæ¥éæä»ç代ç ï¼ç¶åæä»ç亿åèµ°ä¸åèå·²â¦â¦
ä½æ¯ï¼C/C++åjavaçå·®å«å ¶å®ä¹æ²¡æé£ä¹å¤§ãå¦æè¦mojangç°å¨ä¸¢ææææºç ï¼éåä¸ä¸ªmcåºæ¥ï¼ä»ä»¬å¾å¯è½å°±è¦ä½¿ç¨C++ã说ç½äºï¼è¿æ¯å¨é£ä¸ªæ¶é´ç¹ï¼javaæ¯Cä¼å¿æ´å¤§èå·²ã
转ï¼æä¿®æ¹ï¼ä½è ï¼å¤©è±¡
æ¥æºï¼ç¥ä¹
海龟交易策略的mc源码
以下是海龟交易策略的MC源码内容简化版:
初始化参数:初始余额(),损失阈值(2),赢利阈值(4)
创建变量:交易次数(N),止损点(StopLoss),交易价值(DV),账户余额(AccountBalance),系统状态(system),资金风险(DollarRisk),平均权益价格(AvgEtyPrice),交易触发时间(LTT),交易跟踪器(Tracker),上次交易状态(LastTrade),累计盈利(myprofit),最高买入价(HBP),最低买入价(LBP),交易日数(Ndays)
初始化价格变量:历史最高价(L-L)、历史最低价(S-S)
天突破策略:如果当前无交易位置(市场位置=0),计算平均真实波动幅度(N),交易价值(DV),账户余额(AccountBalance),资金风险(DollarRisk),交易触发点(LTT),止损点(StopLoss),并初始化最高买入价(HBP)和最低买入价(LBP)。如果上次交易状态未记录,则进行买入和卖出操作,同时记录历史最高价和最低价。系统状态设置为1。
天突破策略:如果当前无交易位置(市场位置=0),且上次交易状态为卖出,计算并执行与天突破策略相似的操作,但使用天的数据,同时系统状态设置为2。
系统跟踪:如果当前状态为跟踪(Tracker=1/-1),并在价格突破止损或赢利点时改变交易状态。
加仓逻辑:根据当前交易状态和持仓数量执行加仓操作,同时设置止损点。
退出策略:在交易达到指定时间(天或天)后,根据当前市场位置执行卖出或买进平仓操作。
输出报告:打印交易日期、时间、连续赢利次数、连续亏损次数和最大回撤。
请注意,上述描述是简化版本,源代码中包含具体的函数调用和逻辑判断。在实际应用中,需要根据特定的交易环境和市场数据进行调整。
双足机器人mc_rtc框架学习分享(1)BaselineWalkingController复现
双足机器人mc_rtc框架学习分享(1):BaselineWalkingController复现详解
mc_rtc是连接仿真软件与双足机器人操作系统的桥梁,通过MCGlobalController类实现数据交互,控制器需基于MCController基类进行定制。本文将带你逐步复现AIST实验室的BaselineWalkingController控制器。 首先,通过官网或docker进行安装,curl或源码安装均有介绍,注意根据ROS版本调整。遇到编译问题时,如cmake共享模块导入失败或fastcdr库缺失,都有详细解决办法。 接着,从GitHub下载BaselineWalkingController源码,并确保cmake共享模块成功导入。控制器的依赖项,如osqp和osqp-eigen,需要分别安装。编译过程中可能耗时,耐心等待即可。 控制器配置文件需要复制到mc_rtc扫描路径,同时,可选择安装Choreonoid仿真软件进行操作。有两种使用方法:Choreonoid配合rviz,或仅使用rviz进行控制。 关于控制器的使用,只需在mc_rtc面板中选择BWC,启动后可通过GuiWalk面板进行步行操作。若遇到错误,如firstOrderImpedance重复加载,需更新控制器或mc_rtc库。 此外,choreonoid启动时的错误通常与mc_rtc库版本不匹配有关,更新库并检查所有依赖即可。自定义Attitude观察器的安装问题也给出了解决方法。 源码安装时,如SpaceVecAlg安装失败,检查网络或按照提示操作。添加mc_rtc源时的网络问题,也给出了相应的解决策略。